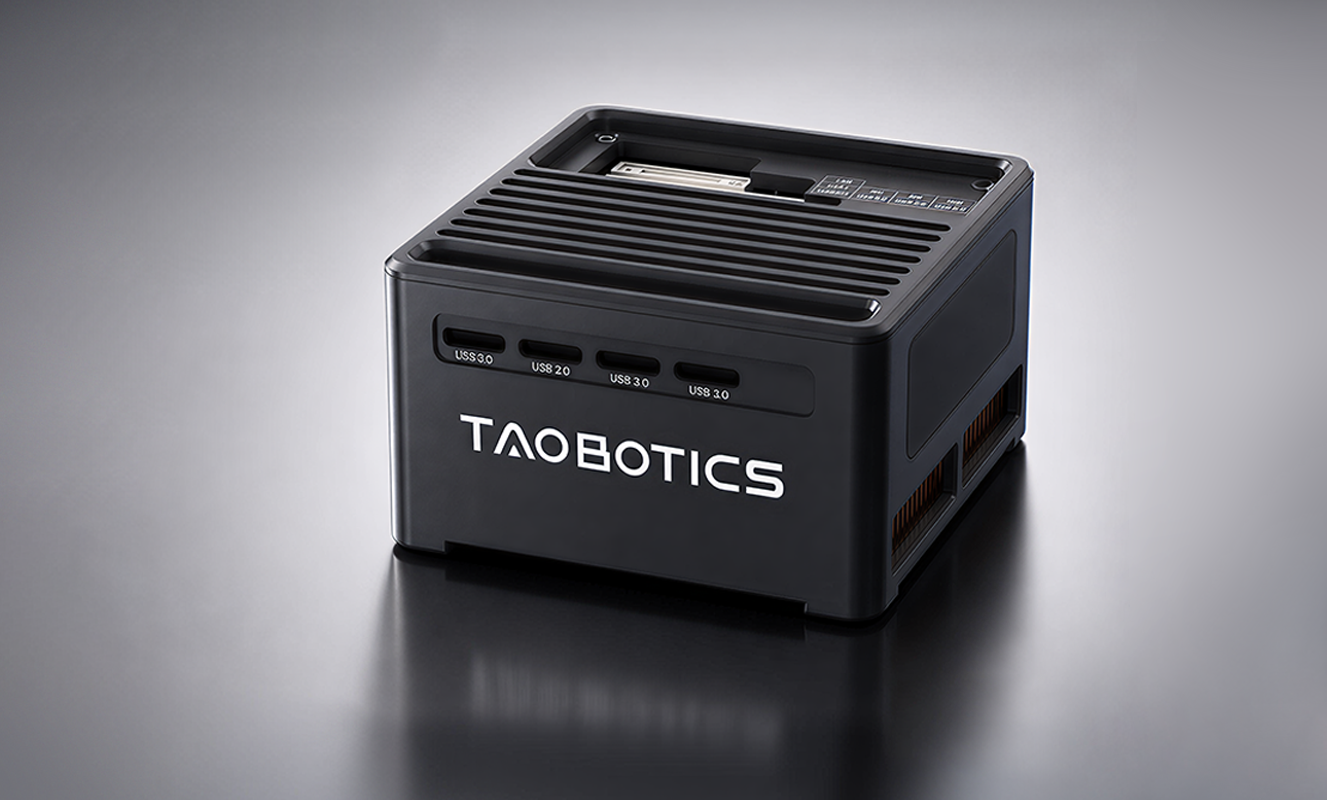
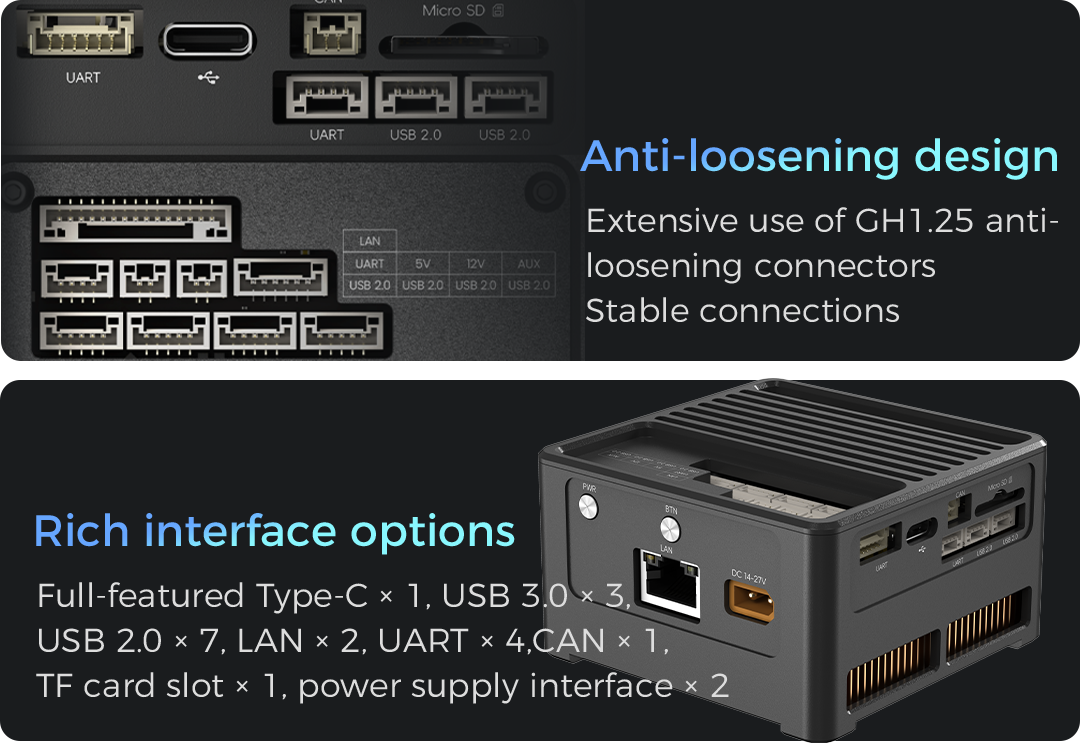
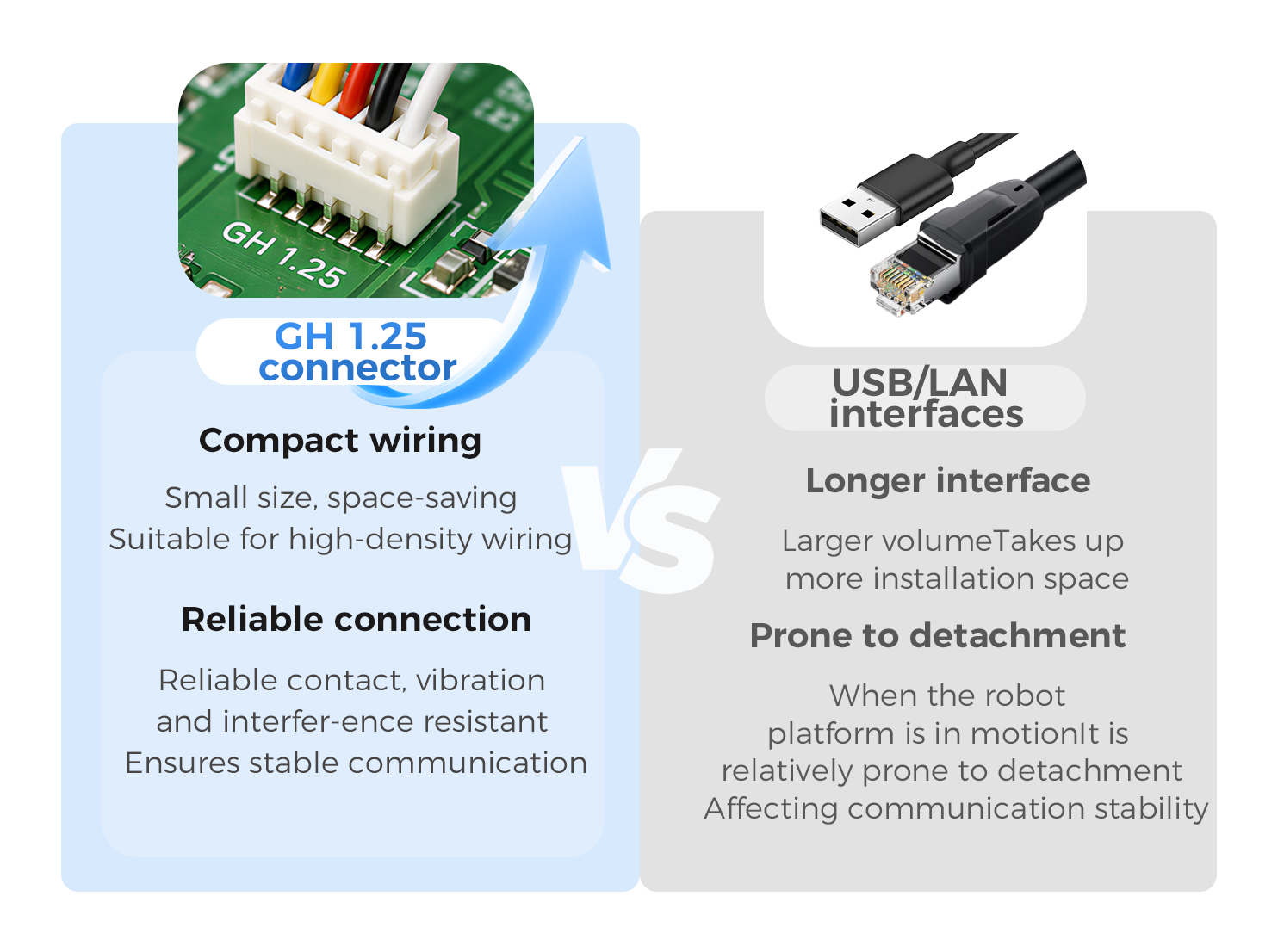
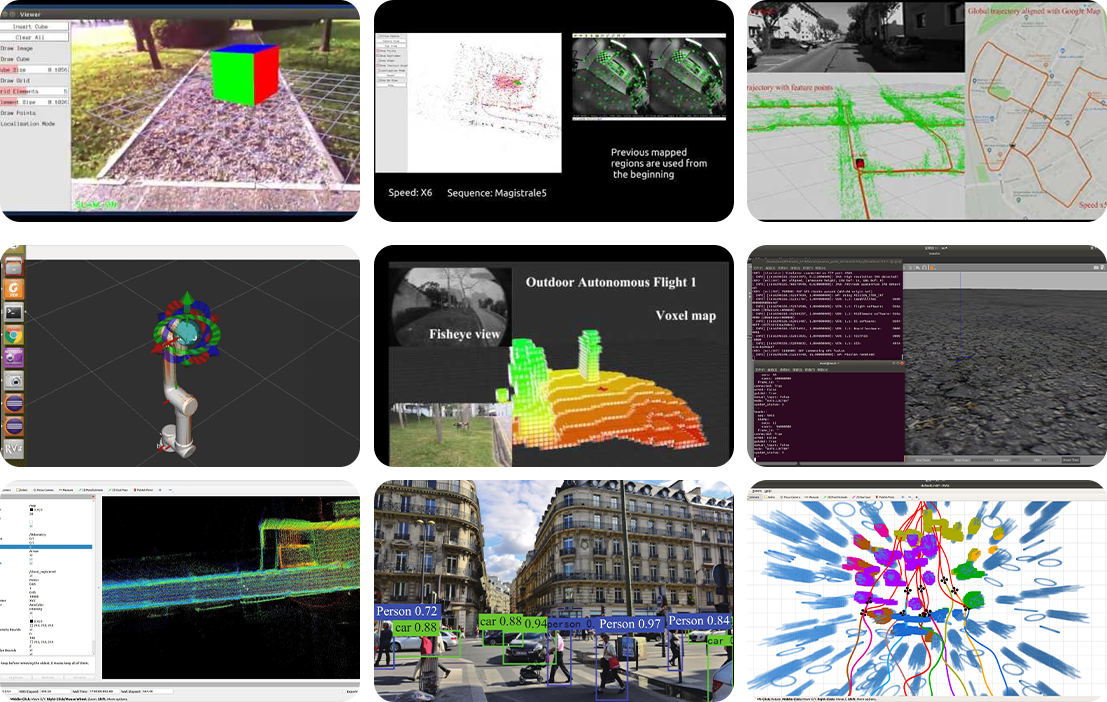
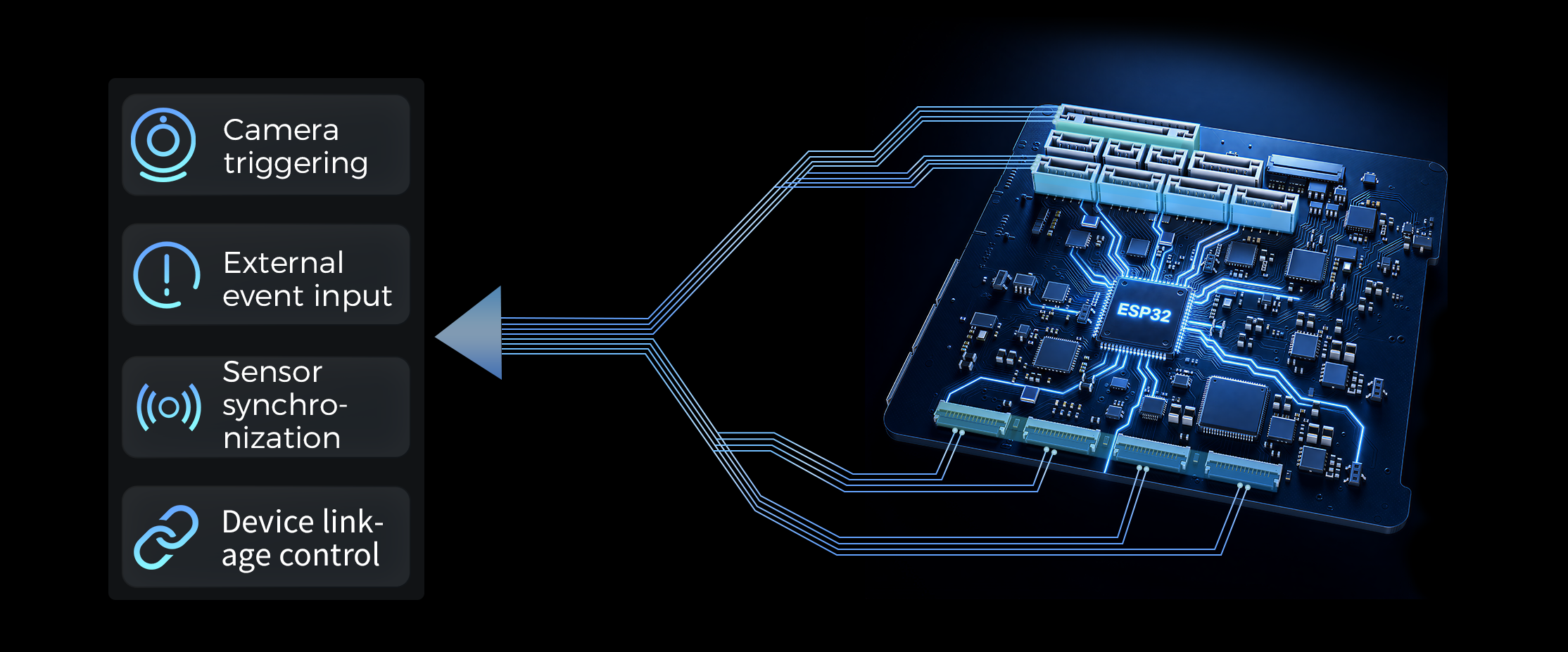
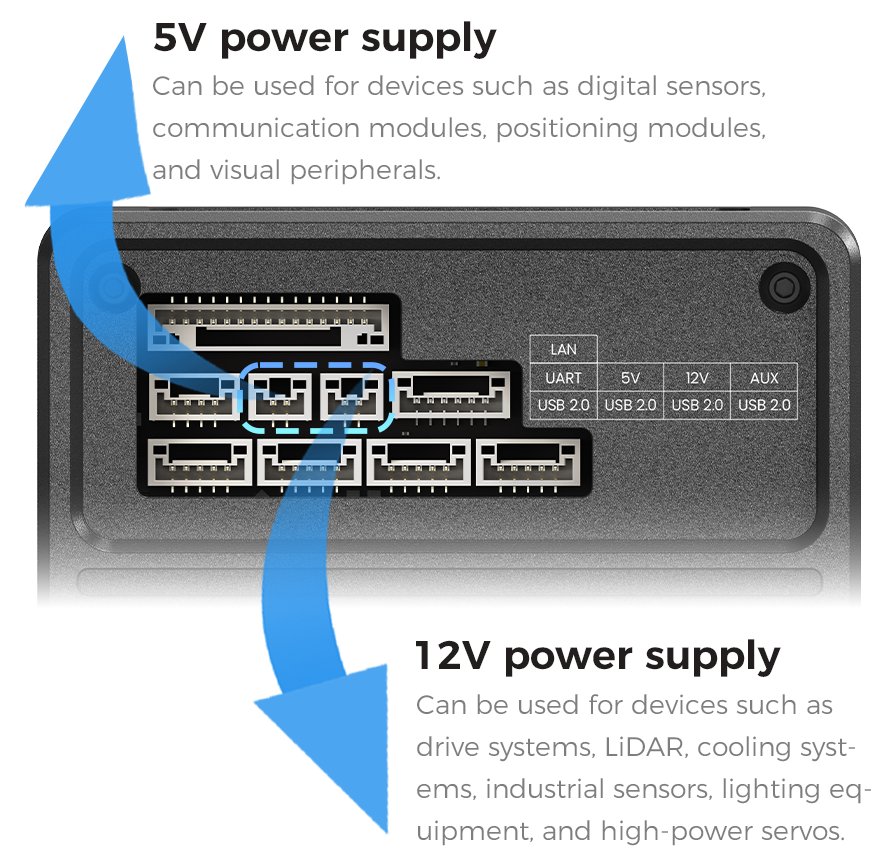
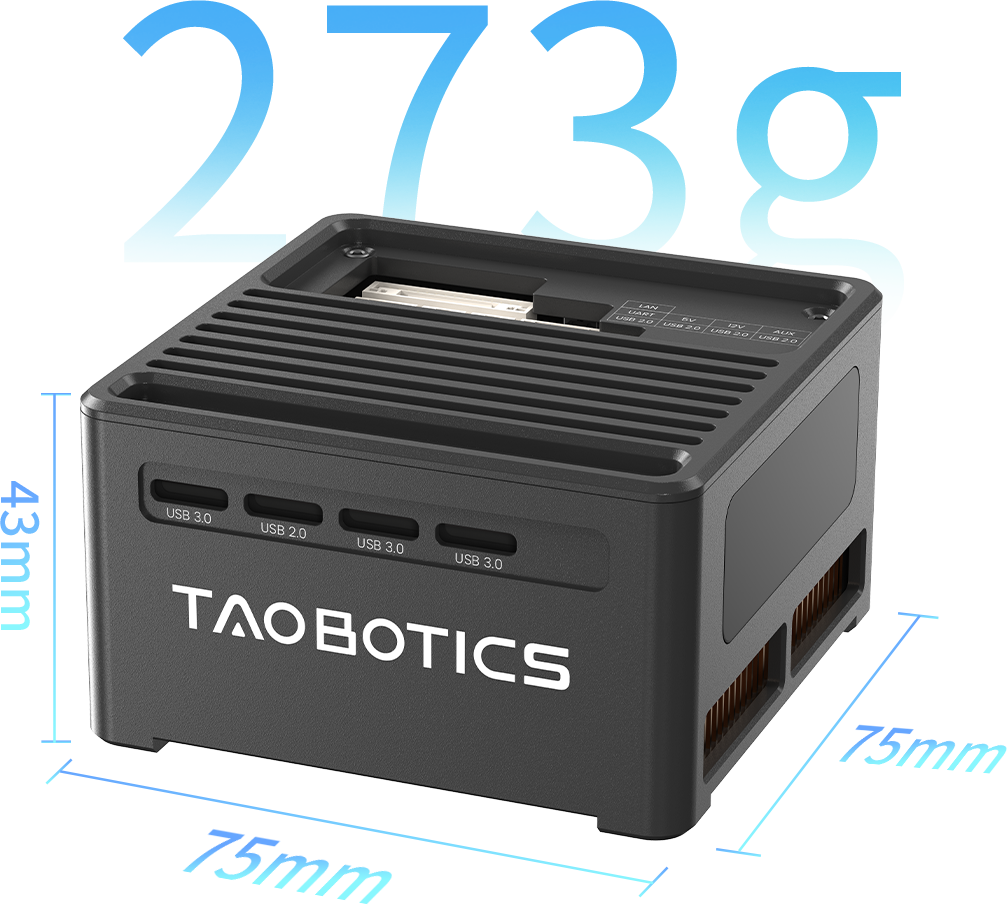
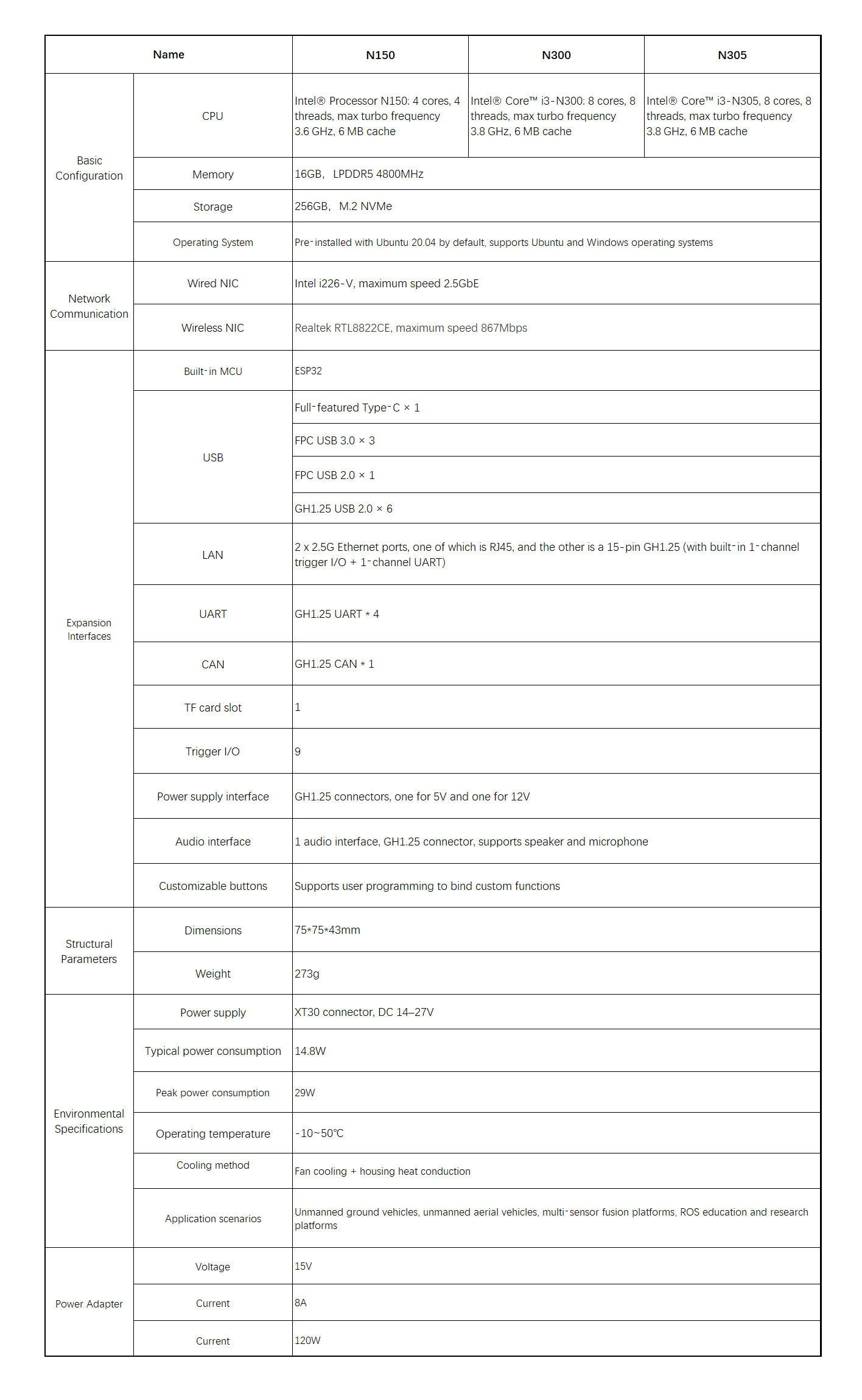
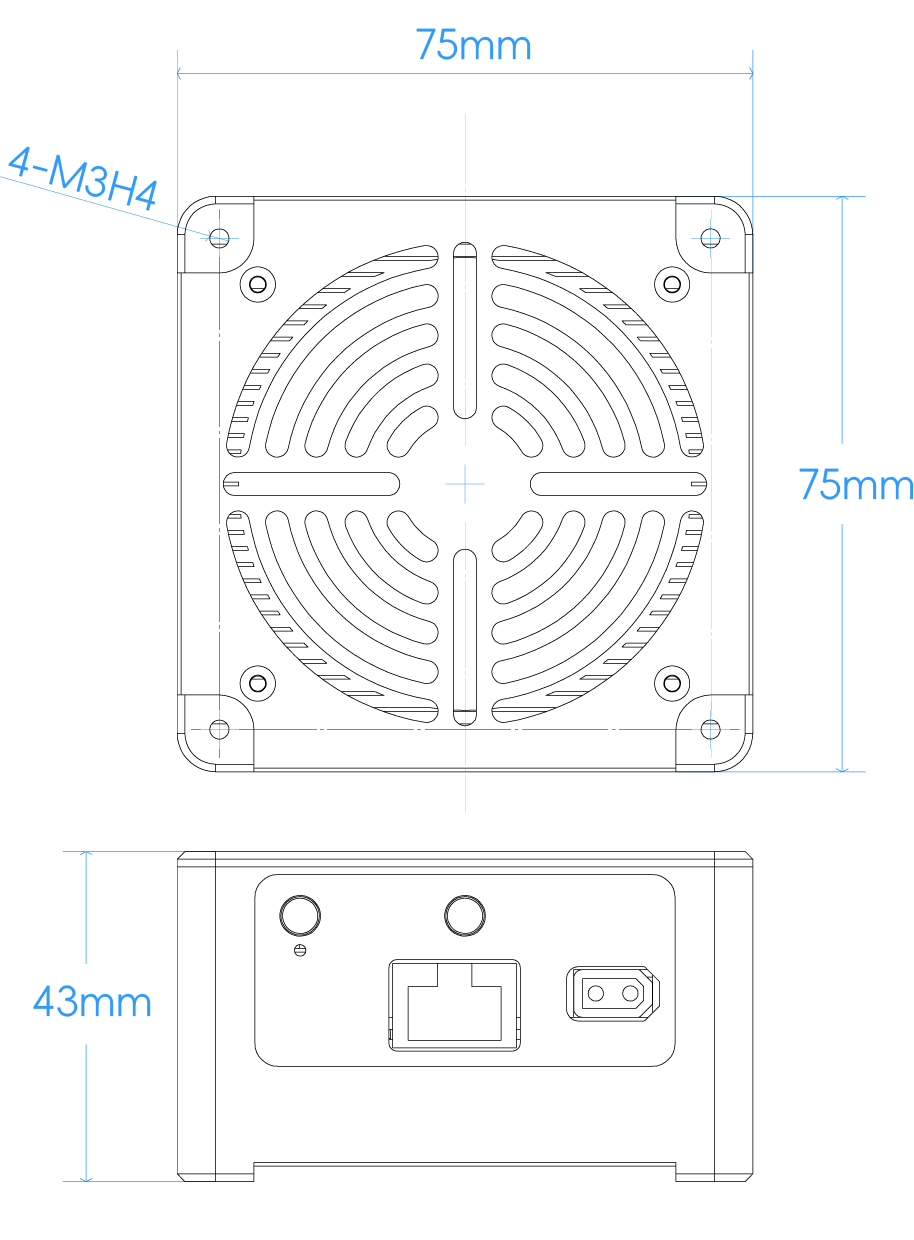
RobotCore Mini is a lightweight x86 Mini host designed specifically for robotics and unmanned systems. It extensively features GH1.25 anti-loosening connectors, ensuring stable and vibration-resistant connections and effectively reducing the risk of cable disconnection. The product is powered by an Intel i3-N305 processor, equipped with 16GB LPDDR5 memory and 256GB storage. The entire unit measures just 74×74×43mm and weighs approximately 273g. With a built-in MCU, integrated dual 2.5G Ethernet ports, USB, UART, CAN, trigger I/O, peripheral power supply interfaces, and customizable function buttons, it is suitable for rapid deployment and reliable operation of unmanned vehicles, drones, inspection robots, and multi-sensor devices.



















{kind=link}
{kind=link}
{kind=link}










{kind=link}
{kind=link}



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



{kind=link}
{kind=link}



{kind=link}
