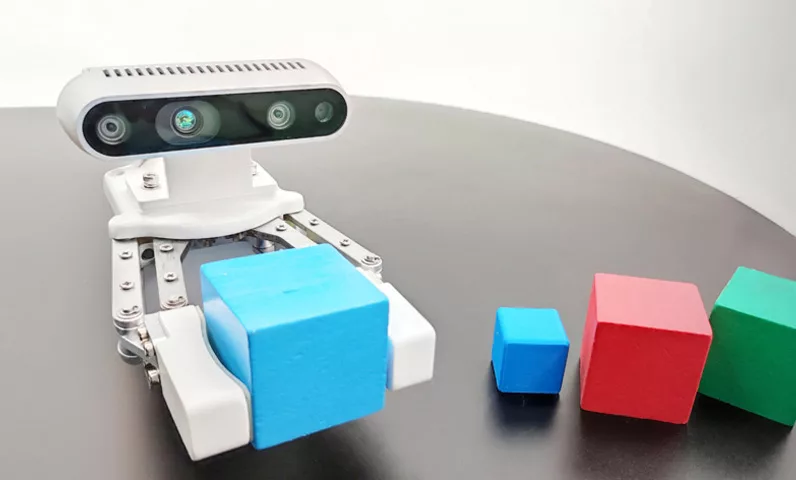
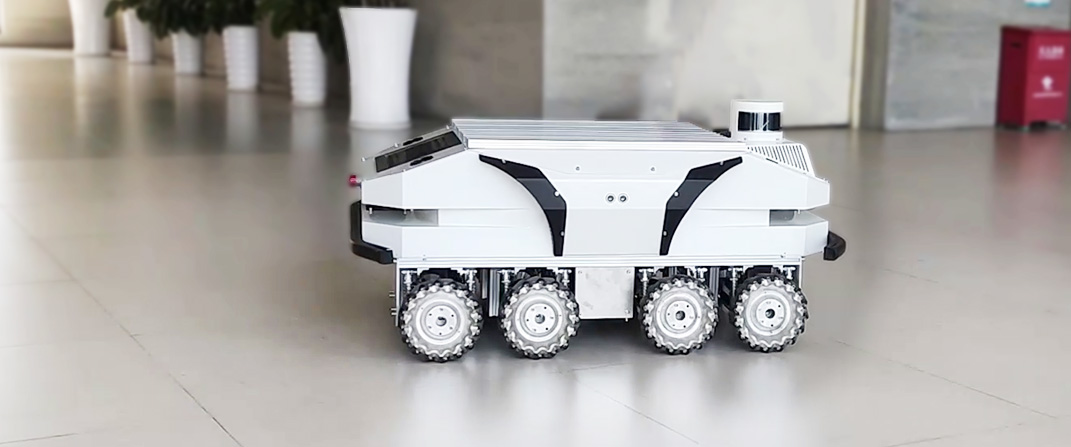
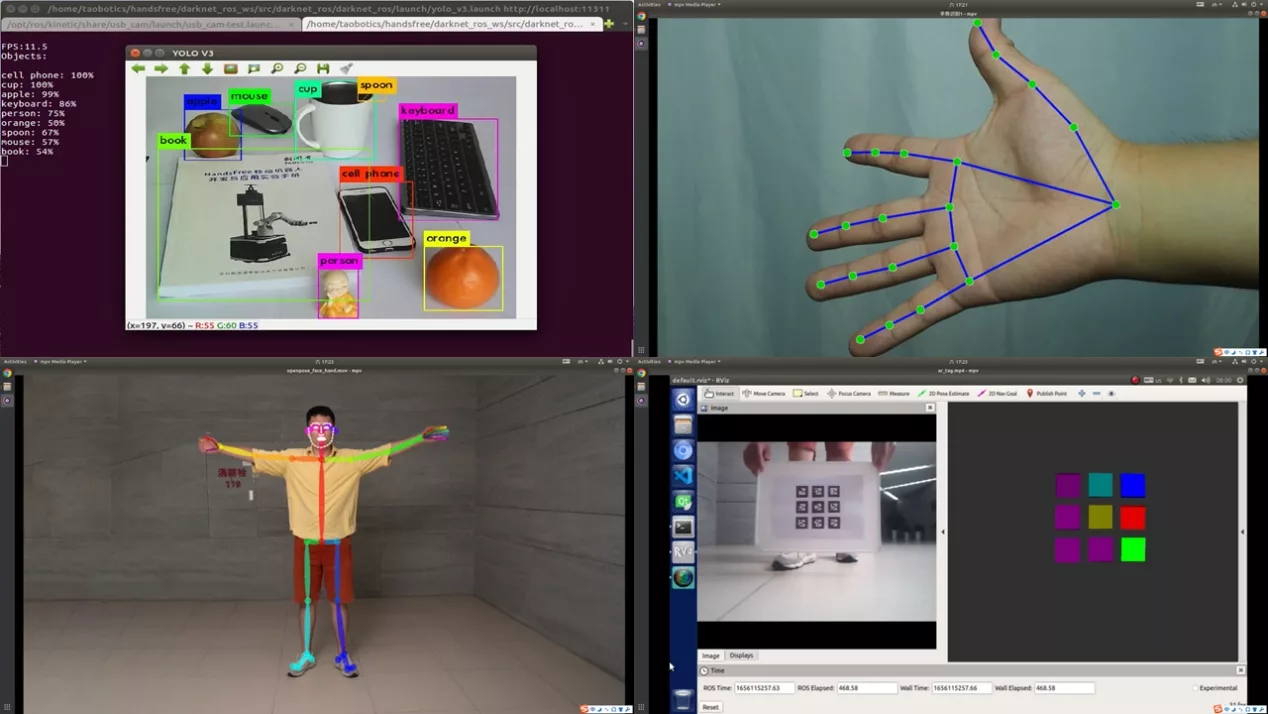
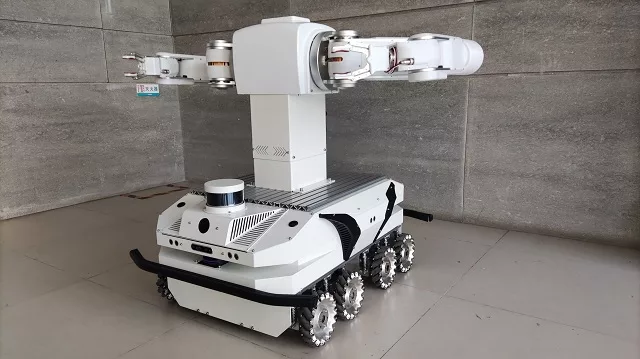
Intelligent agricultural picking robot system RS-AGR, based on the robot picking fruit and vegetable in the natural orchard environment as the prototype, comprehensive use of embedded system, mobile robot autonomous navigation and positioning, robot arm planning, visual recognition, sensor and controller, cloud computing and other technologies, Relying on intelligent unmanned vehicle, multi-axis robot arm, mechanical clamp, binocular camera, liDAR, depth camera, inertial navigation system, wireless network, intelligent gateway and other equipment to achieve unmanned fruit and vegetable picking.






























{kind=link}
{kind=link}

