
















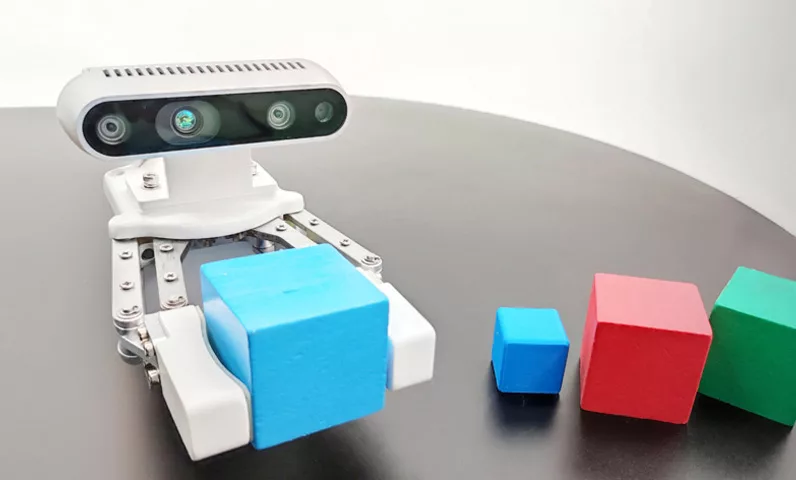





Supporting Robot Arm
Intellisense
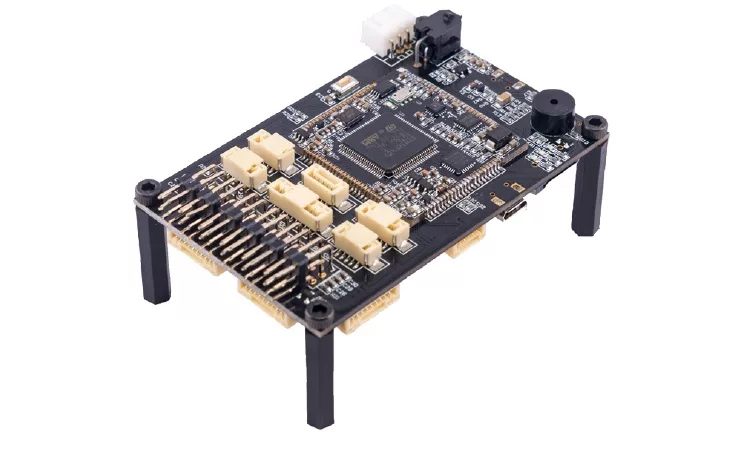
Strong Performance
Multiple Functions
Camera

Supporting Secondary Development
Rich Interface
Open Source Code
C++

Python
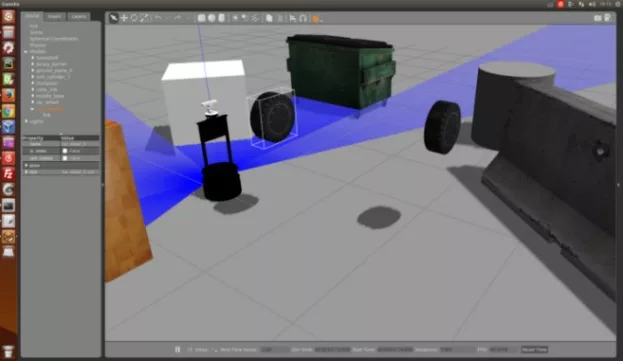
ROS
Use Tutorial




Robot Arm Kit
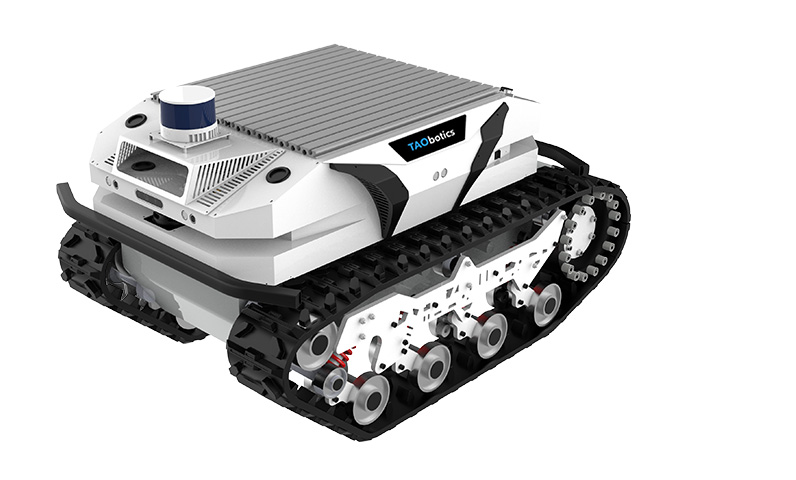
The robot can be extended to install a six axis robotic arm with a working radius of 280mm, a terminal load of 250g, and supports the installation of mechanical claws.

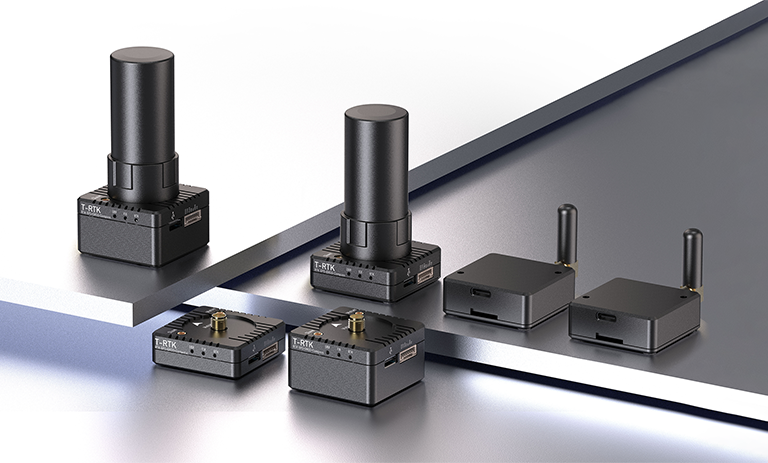
Remote Driving Kit
The robot supports remote driving kit and is suitable for high temperature, high humidity, and toxic environments. Through 4G/5G network remote control and combined with deep learning technology, problems can be detected in a timely manner to ensure the safety of staff.


{kind=link}
{kind=link}
{kind=link}
{kind=link}

