










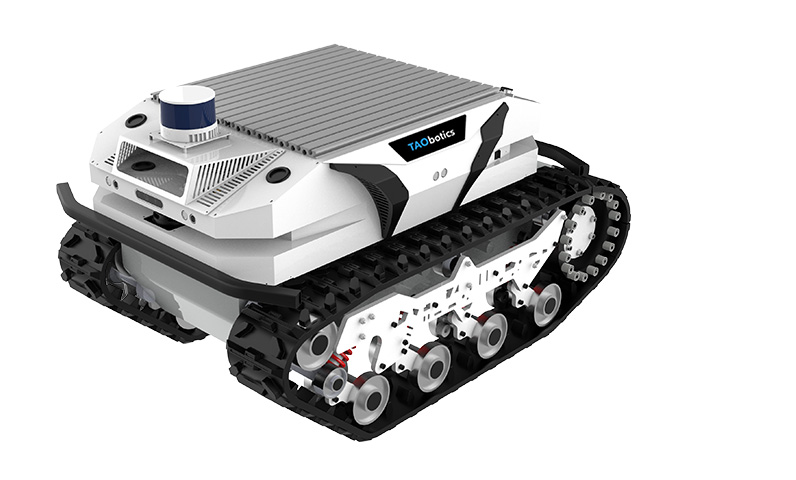










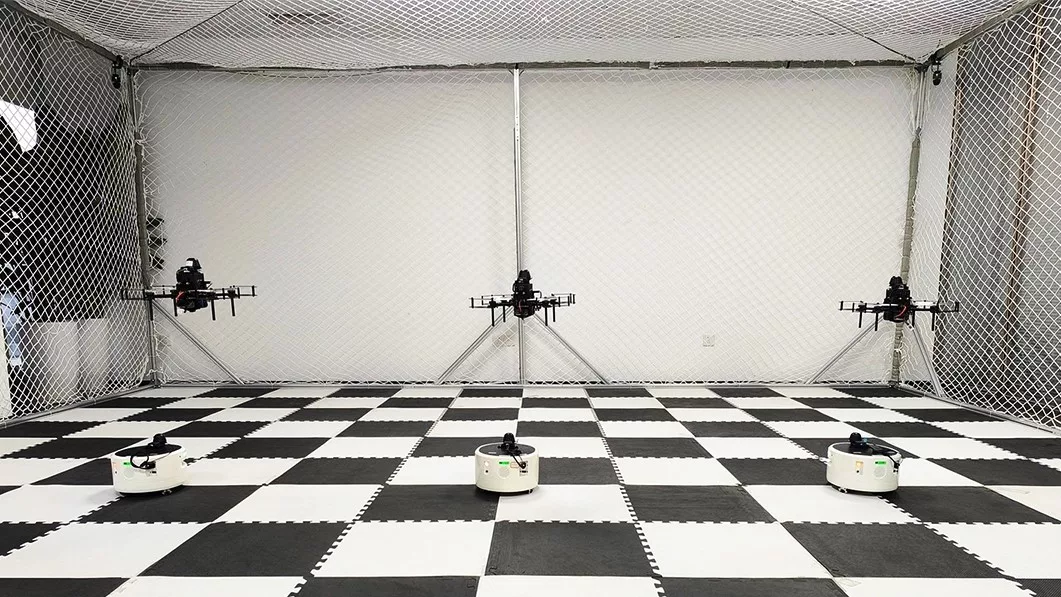
Flexible in Movement
Cluster Formation

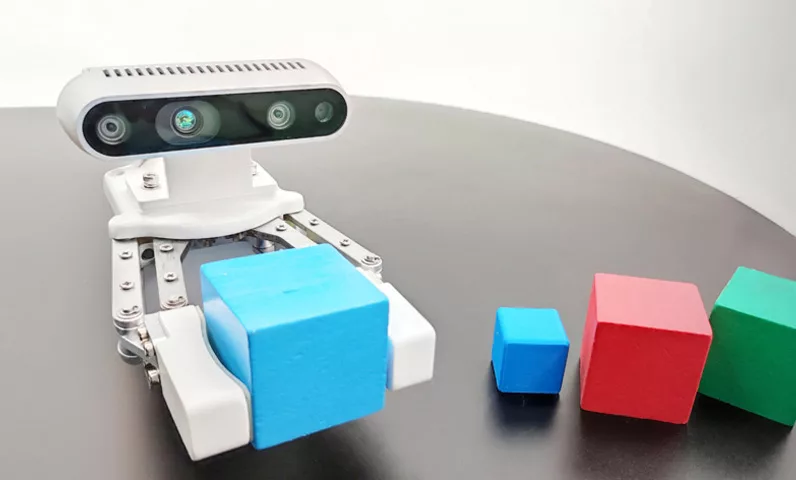
Supporting Robot Arm
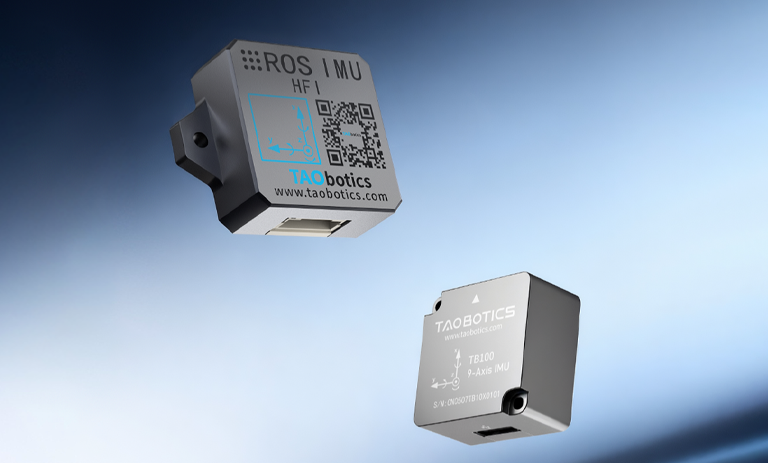
Intellisense
Multiple Camera
Lidar Positioning
Rich Interface
Open Source Code
C++
Python
ROS
Use Tutorial








Robot Arm Kit
Composite, mechanical arm robot can be extended to install desktop six axis working radius of 280 mm, 250 g, end load, can assemble mechanical paw.

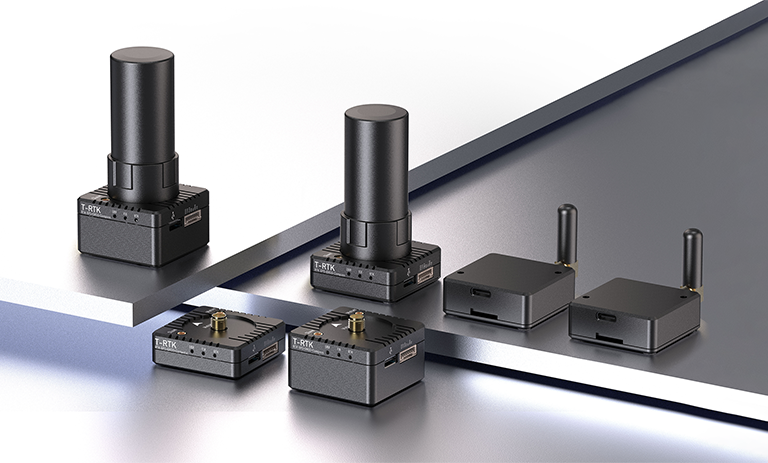
Remote Driving Kit
Composite suite, extensible remote robot driving through the 4 G/ 5 G network remote control, in the dangerous environment of deep learning processing image data, and identifying potential problems, ensure safe and effective processing tasks.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

