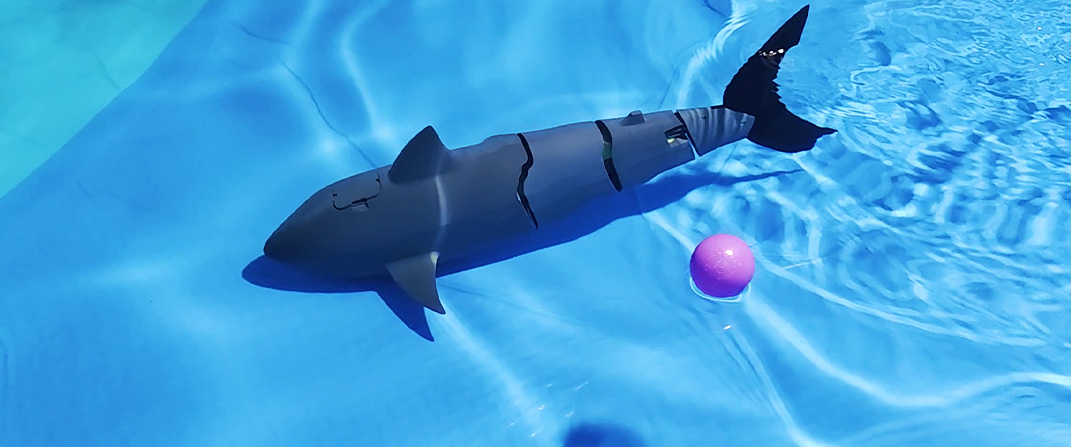
Shark680 is an underwater biomimetic robotic fish developed by Chao Wendao, inspired by the physiological structure of fish. It supports intelligent cluster collaboration, has excellent concealment and military reconnaissance capabilities, and can efficiently execute tasks in complex waters.
PRODUCT FEATURE
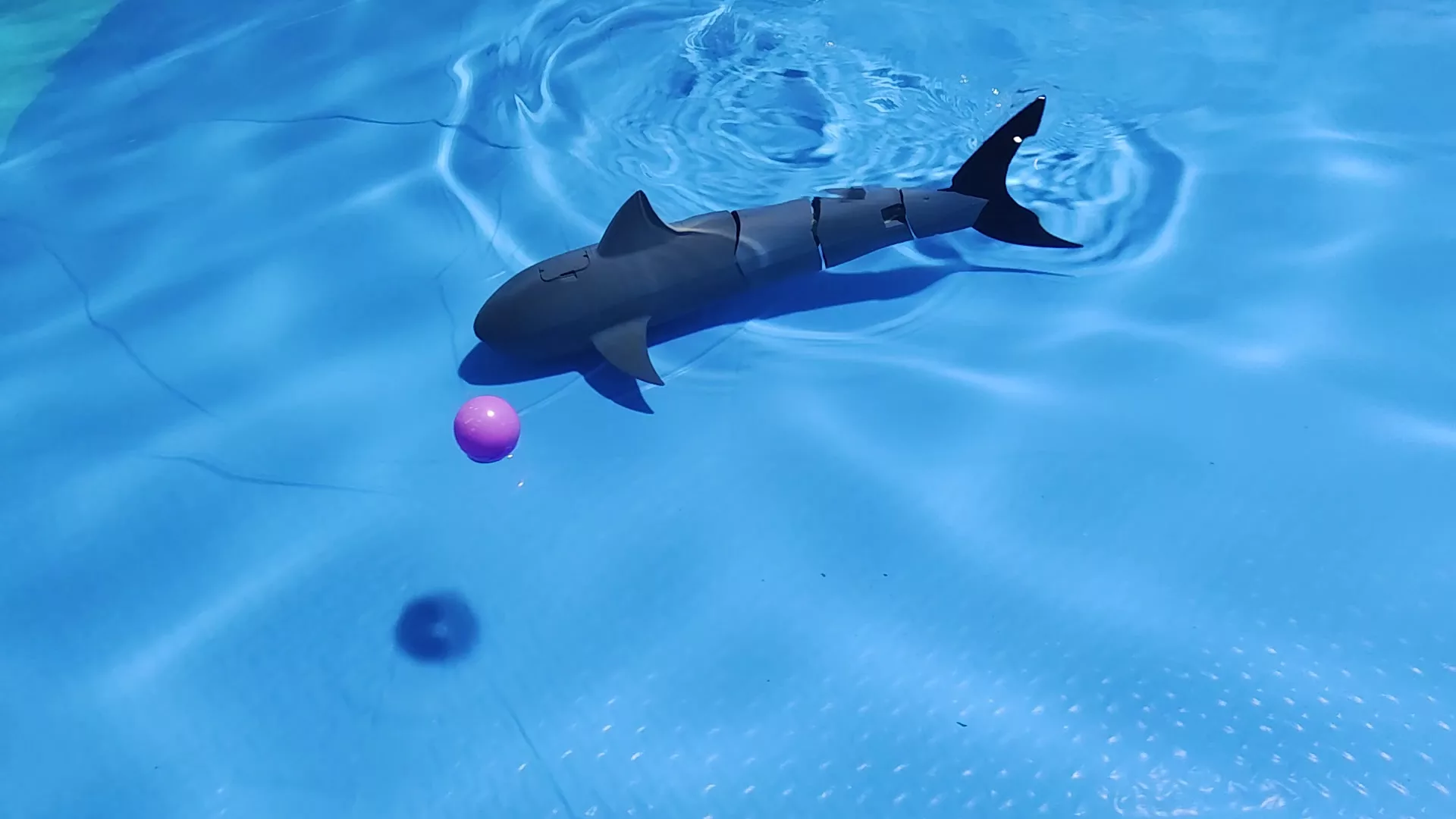
Shark-like Design
Flexible in Movement
Strong Performance
Ultra-long Battery Life
Cluster Formation
Rich Interface
Secondary Development
Open Source Code
C++
Python
ROS
Use Tutorial
High Mobility
Adopting a three joint swing design, inspired by the swimming mechanism of fish. The precise three joints enable the robotic fish to navigate complex underwater environments with ease, effortlessly handling narrow slits, obstacles, precise positioning, and exploration tasks, demonstrating excellent performance.
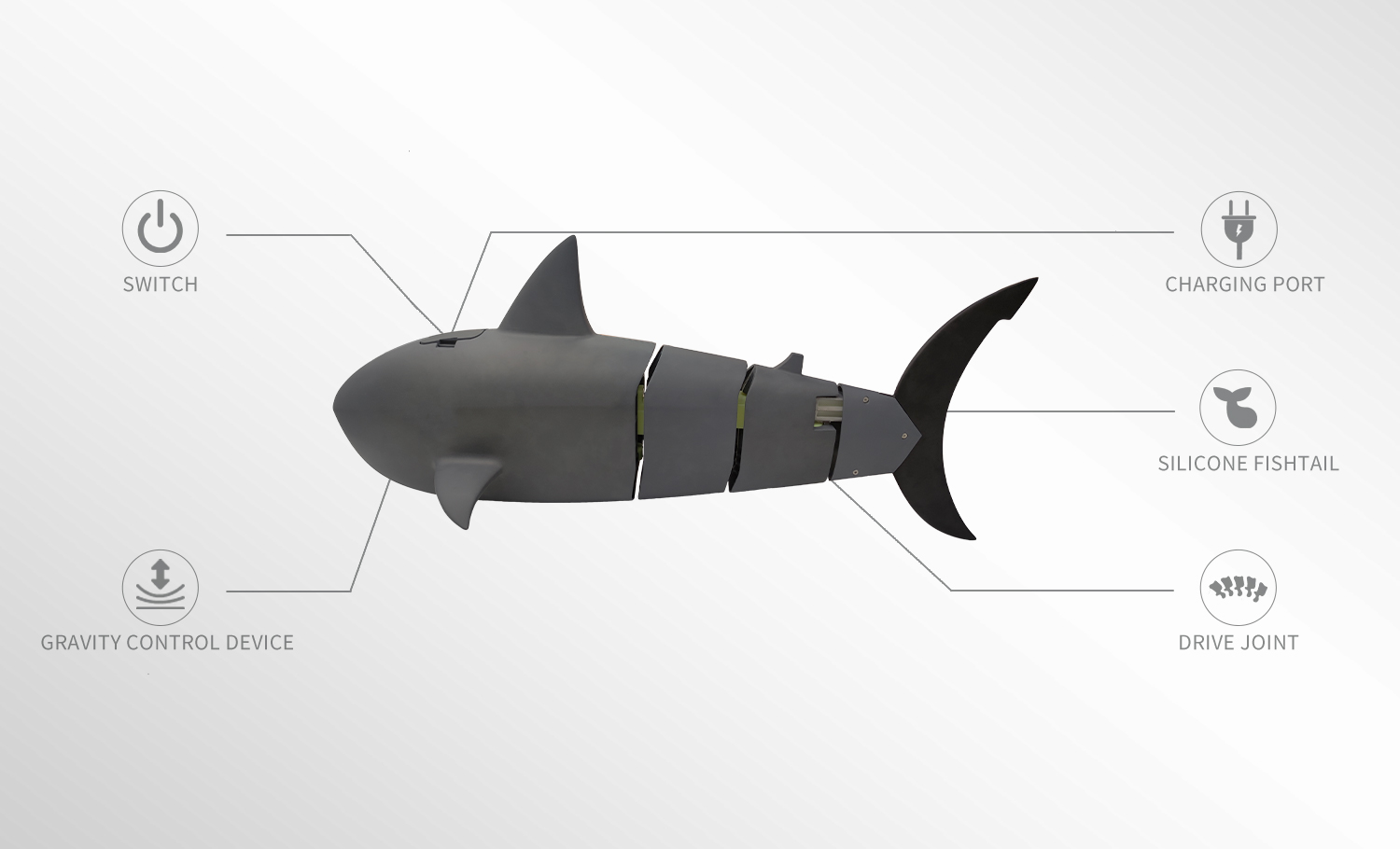
Floating Adjustment
By adjusting the center of gravity and buoyancy of the internal mechanical structure, biomimetic fish can achieve sinking or floating. Moving the center of gravity component can increase the sinking force, while adjusting the center of gravity position to move the floating center upward can use buoyancy to make it rise.
Open Source Code
The robotic fish has excellent performance and is equipped with multiple interfaces to support secondary development. Whether it is improving control accuracy or expanding application scenarios, these interfaces can meet the needs and provide infinite possibilities.
Designer and manufacturer of mobile robots, shipped to over 50 countries worldwide
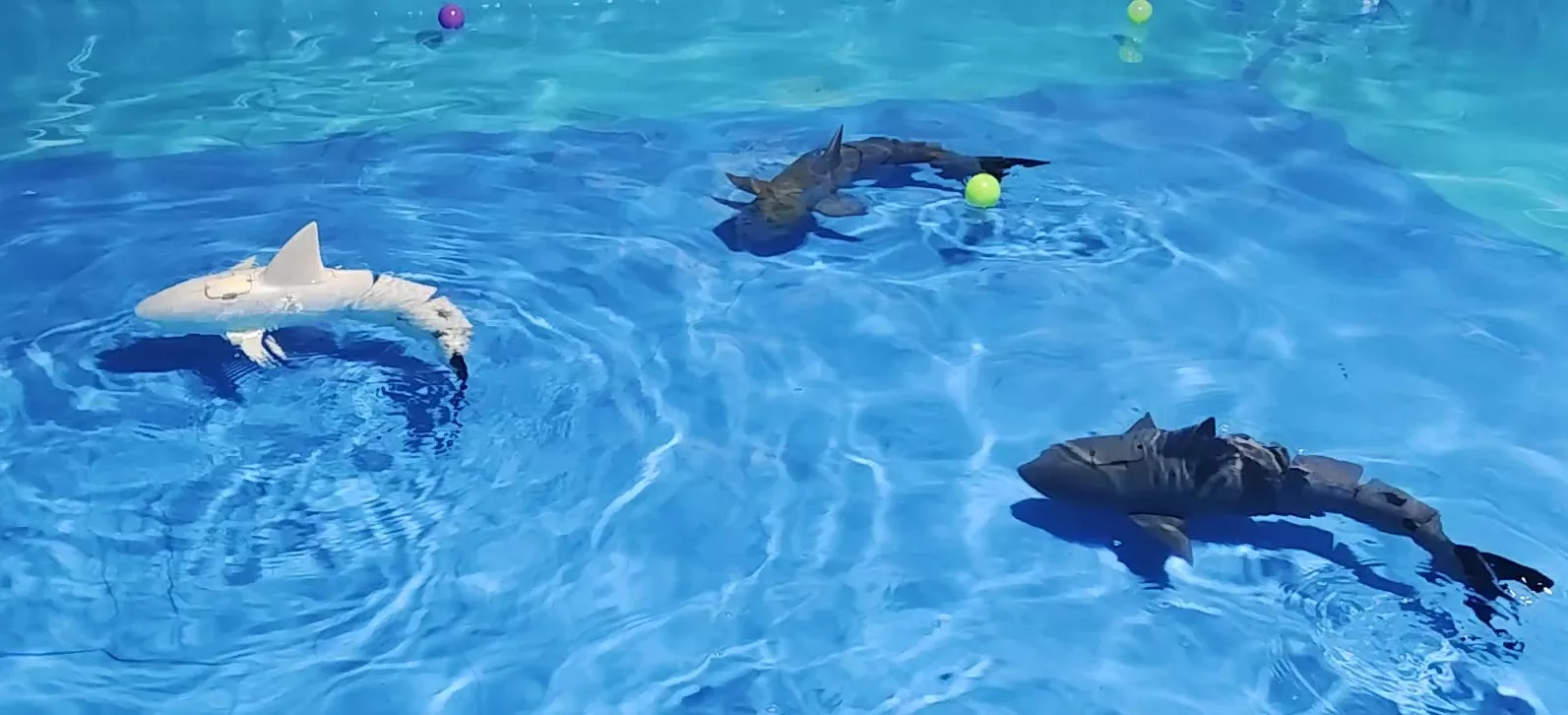
BIOMIMETIC SHARK DESIGN
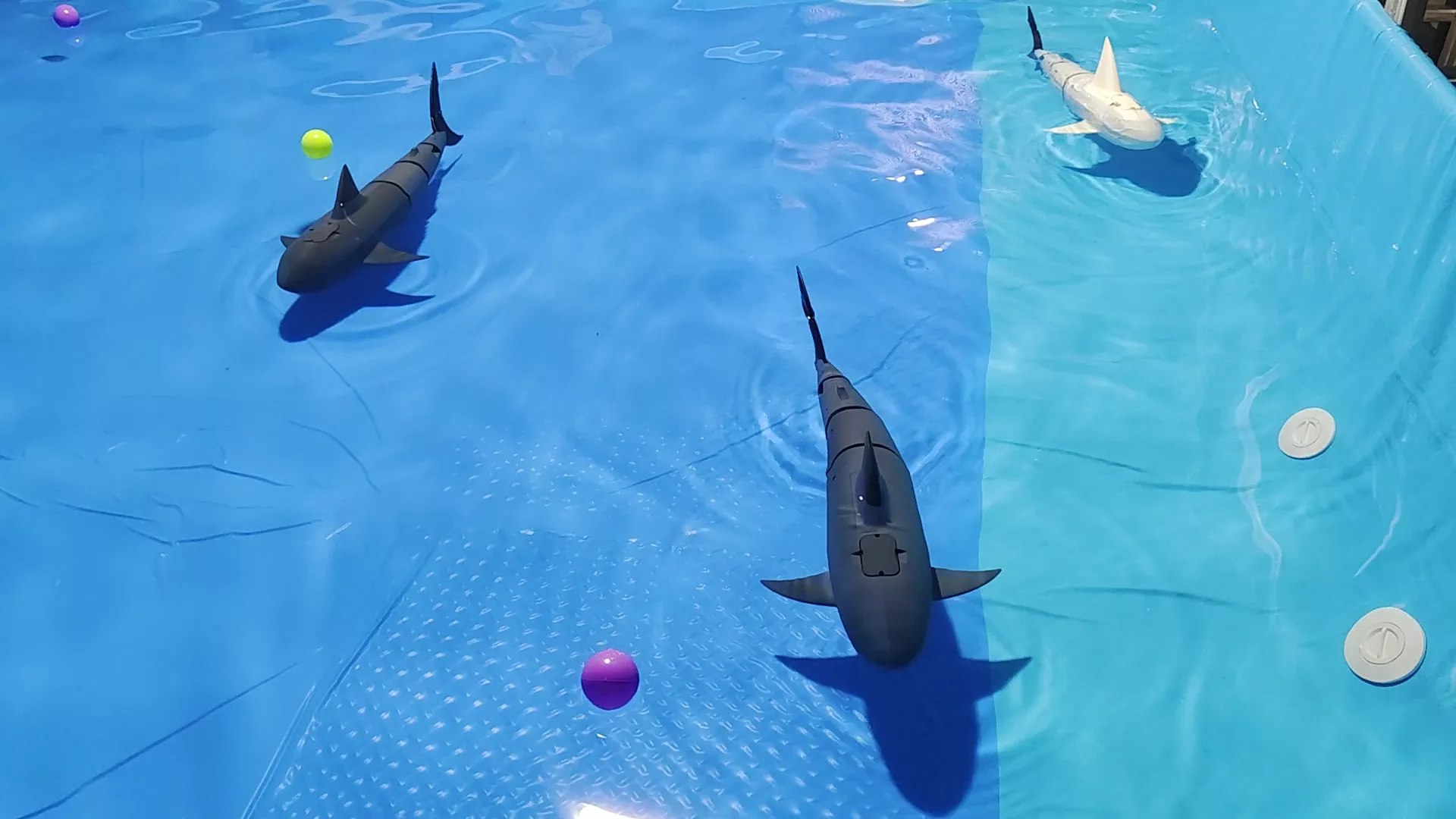
Taking the deep-sea dominant shark as a reference, adopting a shark shaped design. This endows the bionic robotic fish with an elegant appearance, reduces resistance during movement, and enables the bionic robotic fish to perform tasks more quickly and agilely.
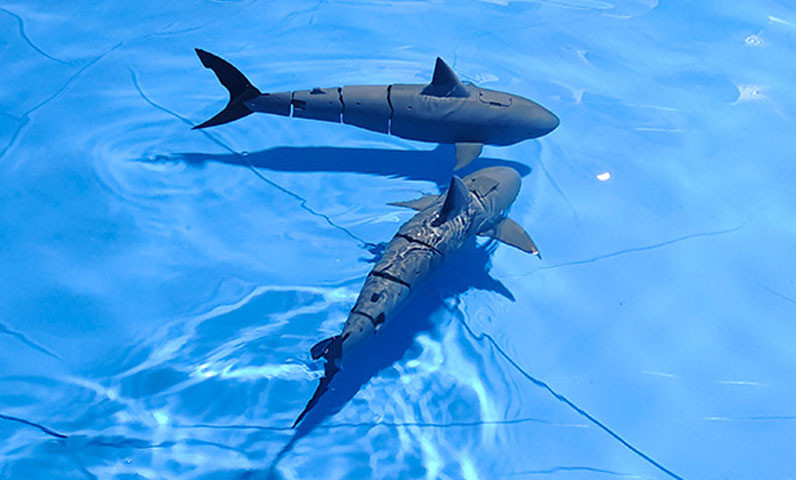
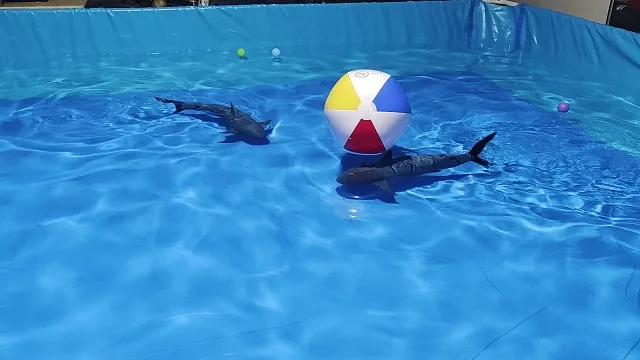
BIOMIMETIC FISH SWARM CONTROL
Each bionic fish has intelligent decision-making ability, adjusting its position and speed based on instructions and environmental information. Under cluster control, they automatically coordinate and maintain overall consistency based on the surrounding environment and the status of other members.
BIOMIMETIC FISH ROBOT CLUSTER FORMATION SYSTEM
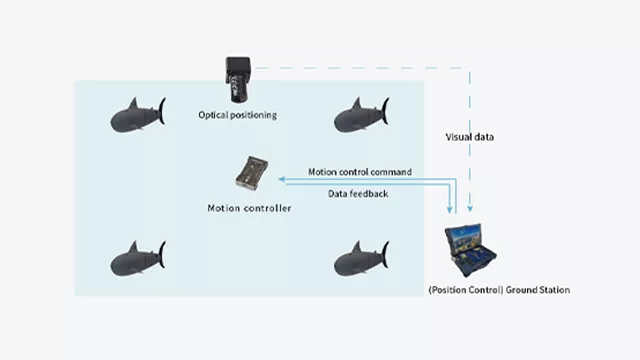
The biomimetic robotic fish swarm formation system utilizes optical positioning technology to support multiple positioning systems and cluster communication. By using a unified control interface, the swarm formation and collaborative control of biomimetic robotic fish can be achieved, ensuring that they move along the planned route.
Overall Design Framework
The system consists of a ground station, wireless transmitter, camera, pool, and robotic fish. PC analyzes camera images, plans paths based on different situations, and returns control strategies to the robotic fish through serial ports and wireless modules.
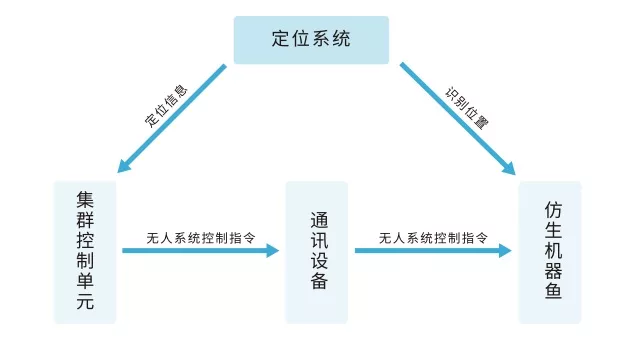
Cluster Collaboration System
The system includes a positioning system, cluster control unit, communication equipment, and bionic robotic fish. The positioning system provides information, the control unit sends instructions, the robotic fish executes tasks, and the communication equipment ensures smooth information flow, achieving efficient collaboration.
BIOMIMETIC FISH ROBOT CLUSTER FORMATION SYSTEM HIGHLIGHTS
Collaborative Decision Making
By controlling algorithms and communication technology, information sharing between biomimetic fish can be achieved. Based on shared information, simulated fish can collaborate to make decisions to adapt to environmental changes and task requirements.
Distributed Control
Each bionic fish has the ability to make autonomous decisions without relying entirely on a central control unit. This enables fish schools to quickly adjust their formation and travel strategies in complex waters, demonstrating a high degree of flexibility and adaptability.
Task Allocation
The cluster adjusts its formation and task allocation in real-time based on tasks and environmental changes, avoiding resource waste and repetitive labor, improving efficiency, optimizing resource utilization, and ensuring optimal performance and coordination in changing environments.
PRODUCT FUNCTION
Teaching the Principle of Robotic Fish
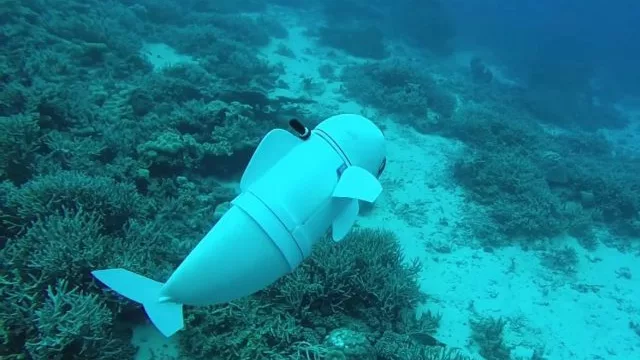
Exploration of Underwater Organisms
Fluid Research
Environmental Monitoring
Underwater Exploration
View and Admire
APPLICATION CASE
TECHNICAL PARANMETER
Product name
Specifications
Detailed data
Shark680
Form factor design
Artificial sharks
Weight
4.0kg
Size
680mmx290mmx303mm
Battery life
3~5h
Standby time
12h
Operating voltage
8.4V
Maximum speed
0.5m/s
Maximum working depth
0.5m
Minimum turning radius
1m
Motion controls the number of joints
3
The center of gravity controls the number of joints
1
Mode of exercise
The three joints swing and the tail fin advances
Position the camera
Cell size
4.5 μm×4.5 μm
Target size
1/1.7″
Resolution
1624×1240
Maximum frame rate
90fps@1624×1240 Bayer RG8
Dynamic range
71.5 dB
Signal-to-noise ratio
43.7dB
Exposure time
Ultra-short exposure mode:1 μs ~ 5 μs
Normal exposure mode:6 μs ~ 10 s
Data interface
USB 3.0,Compatible USB 2.0
Dimensions
29mm×29mm×30mm
pool
Platform size
4m*4m*1m
Material
PVC + Anti-rust galvanized pipe
Active flow control platform
Platform size
3.6m*3.6m*0.6m
Material
Acrylic + aluminum alloy
Embedded control unit
Supply voltage
5-8.4V
PWM interface
24
usb driver-free
In the tank
Online commissioning
In the tank
Runs offline
In the tank
Power adapter
DC voltage
24V
Current rating
3000W
Ripple and noise
<150mV
Voltage accuracy
±1%
Output voltage regulation range
0-24V
Overload protection
105%-135%Type; The constant current output +V0 is reduced to the undervoltage point, the output is cut off, and the power is reset and re-energized
Over-temperature protection
RTH3;The fan rotates normally, and the output is turned off ≥ 90°C
Water flow generator
Propeller diameter
60mm
Maximum withstand voltage depth
20m
Sealing method
Maintenance-free and hermetically sealed
Sealed construction
Rotating dynamic seal structure
Rated thrust
3.8kgf(Positive)/2.5kgf(reverse)
Rated power
178W
Rated voltage
24VDC
Weight
320g
Flow meter
Measuring range
0.0.1-4.00M/S
Measurement method
Rod positioning measurement
Current measurement error
≤1.5%
Temperature range
0℃~50℃
Power supply
DC7.2V lithium battery rechargeable battery, full charge can work continuously for more than 10 hours
































{kind=link}
{kind=link}
{kind=link}
{kind=link}