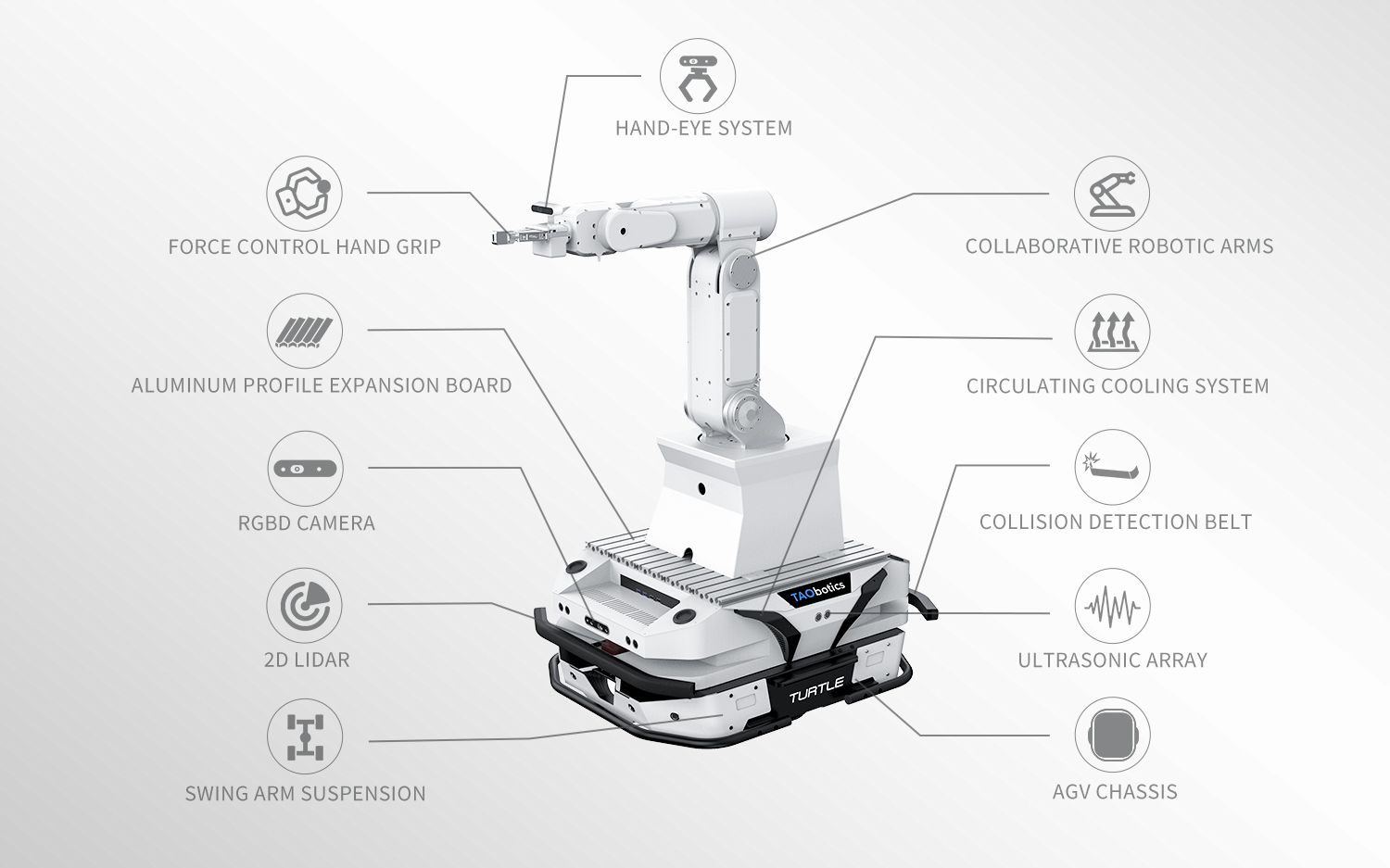
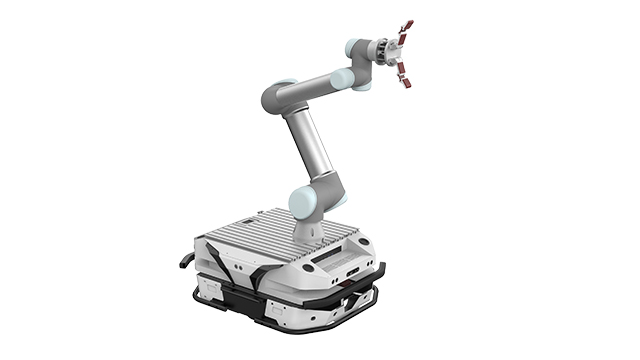
The smart agricultural picking robot platform includes a mobile platform, a robotic arm, actuators, a vision system, and a control system. It supports autonomous navigation, intelligent obstacle avoidance, fruit and vegetable recognition, dynamic error calibration, and workload control, and can perform unmanned path planning and fixed-point parking.
PRODUCT FEATURE
Supporting Robot Arm
Visual Grab
Strong Arithmetic Power
Autonomous Navigation
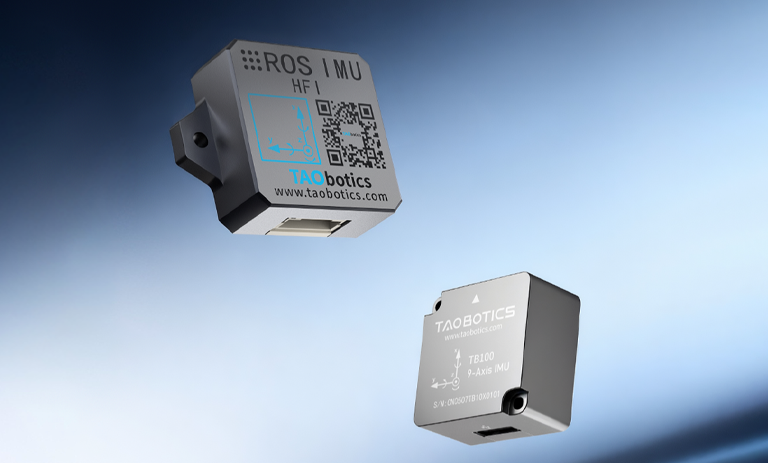
Depth Stereo Camera
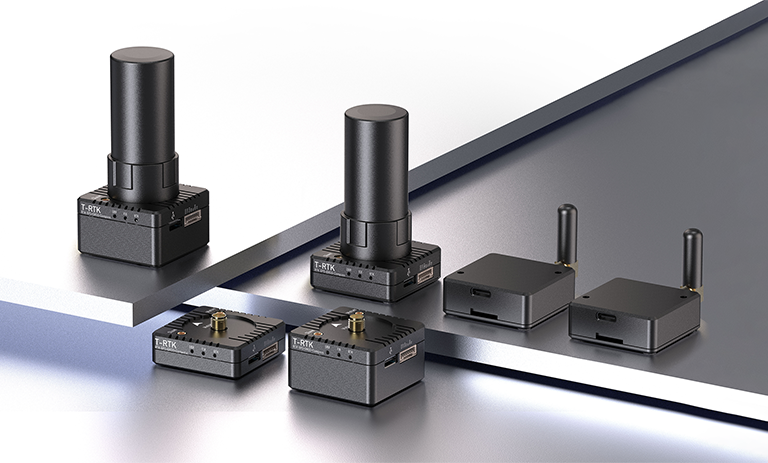
Lidar Positioning
Secondary Development
Open Source Code
C++
Python
ROS
Use Tutorial
Real-Time Perception Obstacle Avoidance
Equipped with multiple advanced sensors, it accurately perceives the environment through fusion technology. The internal system utilizes advanced algorithms to process data, develop optimal obstacle avoidance strategies, achieve real-time obstacle recognition and safe path planning, and effectively reduce collision risks.
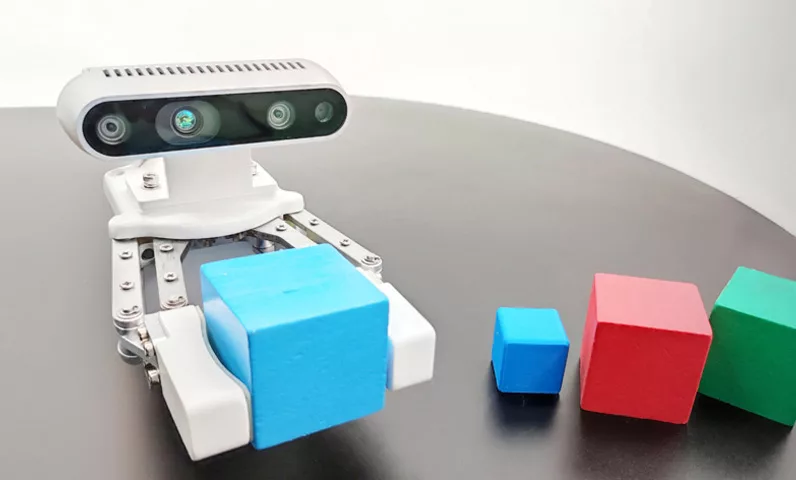
Hand-Eye Coordination
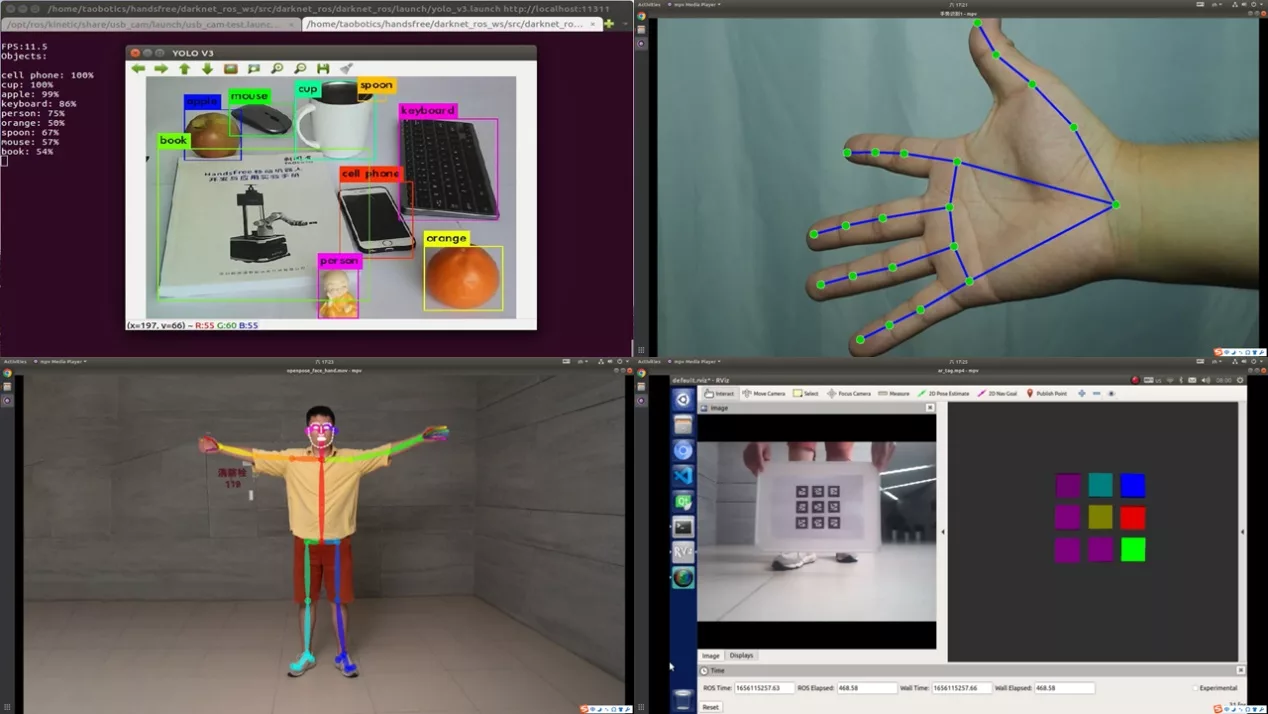
Equipped with depth cameras and advanced image processing algorithms to achieve fast target object recognition and localization. By combining precision robotic arms and flexible mechanical claws, flexible operation and stable grasping of target objects have been achieved.
Automatically Identify Fruits and Vegetables
Integrating image recognition and artificial intelligence technology, robots capture and analyze fruit and vegetable images in real-time. Utilizing deep learning algorithms to quickly and accurately identify the types of fruits and vegetables, achieving efficient classification and processing.
Motion Planning of Robot Arm
Equipped with advanced robotic arm planning system, providing high precision and efficiency. The system utilizes complex algorithms and high-speed computing to finely plan each action, automatically adjust paths and speeds, adapt to different environments and task requirements, and ensure precise operation.
Designer and manufacturer of mobile robots, shipped to over 50 countries worldwide
RICH MATCHING SCHEMES
The platform integrates six intelligent unmanned vehicles and multiple robotic arms, supporting free combination according to research needs and simulating complex agricultural environments. Provide experimental support for research on precision agriculture, crop monitoring, and disease and pest identification.
MODULAR DESIGN
Intelligent unmanned vehicles, collaborative robotic arms, and other agricultural intelligent devices can be selected and combined as independent modules. Modular design provides unprecedented flexibility and simplifies operation and maintenance processes.
PRODUCT FUNCTION
Fruit Identification
Robot Arm Picking
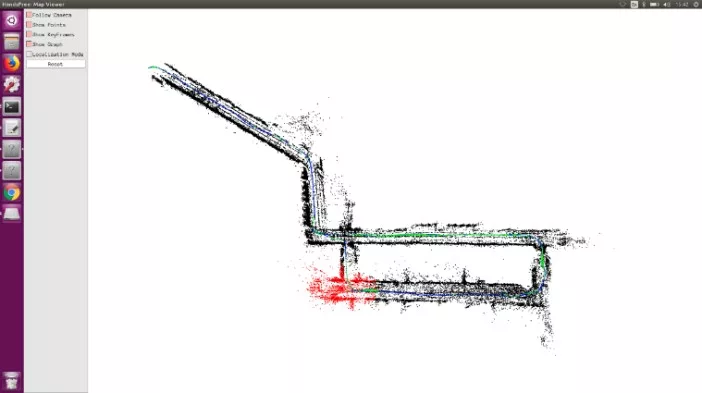
SLAM Environment Mapping
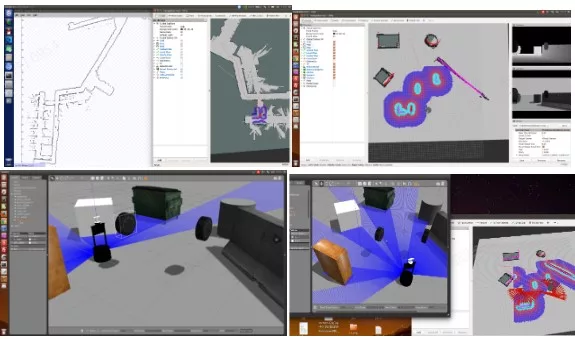
Autonomous Positioning Navigation
Python Programming Practice
ORB_SLAM Practice
Simulation Practice
Machine Learning
Rich Tutorials
APPLICATION CASE
TECHNICAL PARANMETER
Standard Configuration
Middle Configuration
High Configuration
Specifications
Standard Configuration
Middle Configuration
High Configuration
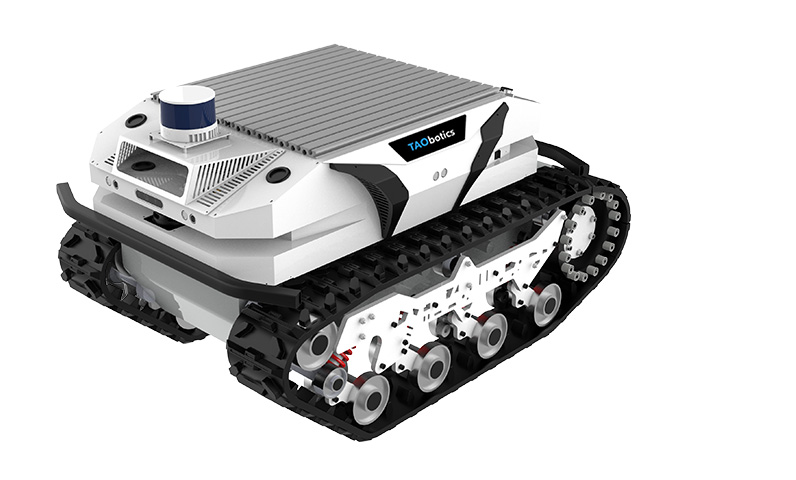
Unmanned Vehicle
Intelligent Differential AGV Robot Standard configuration x1
Intelligent Differential Four-wheel Drive Unmanned Vehicle High configuration x 1
Intelligent Differential Four-wheel Drive Unmanned Vehicle High configuration x 2



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}