


















RS-URSD

PRODUCT INTRODUCTION
The Intelligent Perception and Control Laboratory of Unmanned Systems at Northwestern Polytechnical University (NPU) has launched a real-time map reconstruction system for cluster UAVs, which uses map reconstruction and deep learning technology to support offline, real-time 2D and 3D map reconstruction. The system provides rapid environmental information acquisition, analysis and decision support for agriculture, emergency fire protection and public safety inspection.

PRODUCT FEATURES
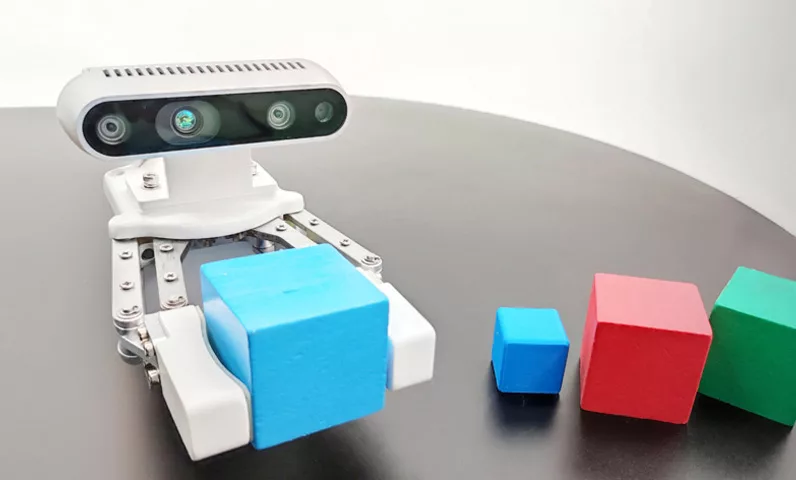
Visual SLAM
Cooperative Operation
Instant Mapping

Autonomous Planning Path
Elastic Intelligent Scheduling

Automatic Marking Up

Etwork Extraction
Supporting Secondary Development

Open Source Code
C++
Python

ROS
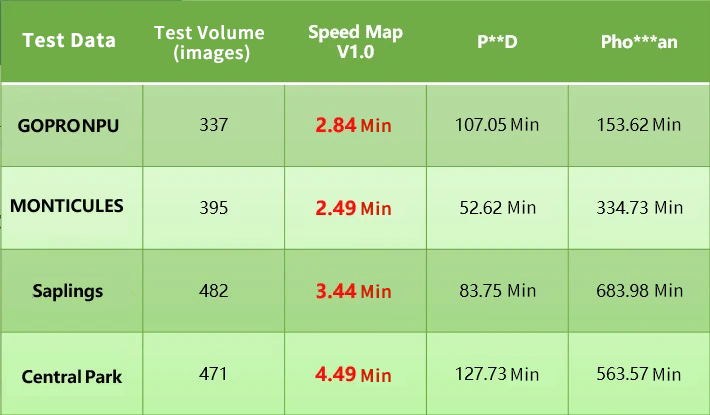
High Efficiency, Fast Speed
The difference between real-time map splicing time and real-time data acquisition time is no more than 30 seconds, which is 1-2 orders of magnitude shorter than that of traditional quick map piecing time.
Efficient Intelligence
Manage five UAVs simultaneously, support automatic route planning, with target recognition, accuracy and recall rates of no less than 85%.


Strong UAV Performance
Uavs are lightweight, low noise, low power, long endurance, low takeoff condition requirements, and strong wind resistance.
Functional Perfection
Support 3D height measurement, visibility check, zoom in and out of 3D dense point clouds and other operations, can be used for emergency rescue and other scenarios.
Open Source Code
Platform for all open source code, users are free to access, modify and extend the platform function.
Designer and manufacturer of mobile robots, shipped to over 50 countries worldwide
Multi-machine Collaborative Mapping
Platform through surveying and mapping, many sets of unmanned aerial vehicle (uav) cooperative efficiency significantly increased. Drones can simultaneously cover a larger area for efficient data acquisition and accurate recording, which is suitable for terrain mapping, agricultural monitoring and infrastructure inspection.

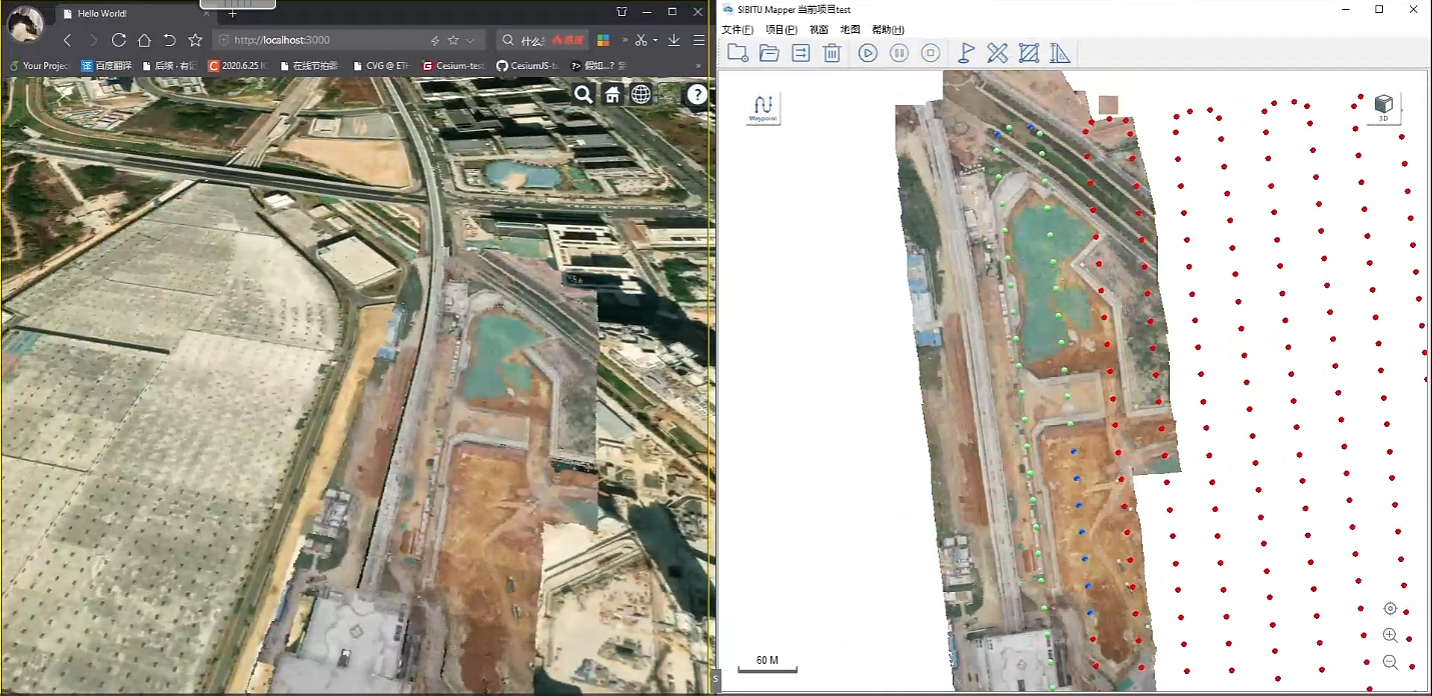
Real-time Mappingg
Platform to realize the “flying – while get – processing – transfer – while mapping” real-time map generation. The drone obtains images in real time while flying, and the on-board host processes the data and transmits it to the ground workstation to quickly generate a map. This solution reduces mapping time from hours to minutes, greatly improving efficiency.

PRODUCT FUNCTION





APPLICATION CASE
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
TECHNICAL PARAMETER
|
|
Specifications |
Parameter |
|
|
|
|
Drone Type |
Quadcopter Drone |
|
|
|
|
Weight |
1.4kg |
|
|
|
|
Take-off Weight (approx.) |
3.8kg |
|
|
|
|
Maximum Load |
1.5kg |
|
|
|
|
Diagonal Wheelbase |
600mm |
|
|
|
|
Wind Resistance Class |
15m/s |
|
|
|
|
Maximum Fight Altitude |
5000m |
|
|
|
|
Airborne Computing Unit |
CPU |
Intel i7 11th Gen |
|
|
|
Memory |
16GB |
|
|
|
|
Storage |
500GB |
|
|
|
|
Airborne Camera |
Picture Resolution |
5472×3648 |
|
|
|
Video Resolution |
4k,2.7k |
|
|
|
|
Tripod Head |
3-Axis Stabilized Tripod Head |
|
|
|
|
Port |
Ethernet interface |
|
|
|
|
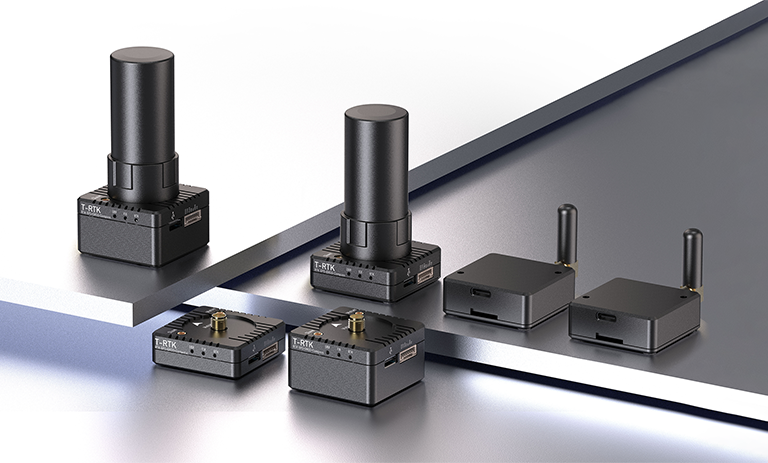
Communication Module |
Transmission Delay |
3ms |
|
|
|
Communication Distance |
15km |
|
|
|
|
Duplex Communication Mode |
TDD |
|
|
|
|
Maximum Transmitting Power |
30dBm |
|
|
|
|
Upload Speed |
400kbps |
|
|
|
|
Download Speed |
2.3Mbps~8Mbps |
|
|
|
|
Remote Controller |
Screen resolution |
1920×1080 |
|
|
|
Other Function |
It has the functions of UAV manual control, automatic flight planning and status display. |
|
|
|
|
Network Support |
Integrated IP map transmission ground end module |
|
|
|
|
|
|
|
|
|
|
Name |
Standard configuration |
|
|
|
|
Drone Type |
VTOL |
|
|
|
|
Wingspan |
2.5m |
|
|
|
|
Fuselage Length |
1.10m |
|
|
|
|
Take-off weight |
7.5kg |
|
|
|
|
Cruising speed |
18m/s |
|
|
|
|
Wind Resistance Class |
8m/s |
|
|
|
|
Cruising Qind Resistance Rating |
12m/s |
|
|
|
|
Unladen Airtime |
160min |
|
|
|
|
Unladen Range |
170km |
|
|
|
|
Standard Load Duration |
120min |
|
|
|
|
Standard Load Range |
120km |
|
|
|
|
Airborne Real-time Puzzle Module |
CPU |
Intel Celeron J4125 |
|
|
|
Memory |
8GB |
|
|
|
|
Storage |
256GB |
|
|
|
|
Airborne Camera |
Tripod Head |
3-Axis Stabilized Tripod Head |
|
|
|
Resolution |
20 million |
|
|
|
|
Video Recording |
Supporting 4K |
|
|
|
|
Camera Interface |
Ethernet interface |
|
|
|
|
Communication Module |
Communication Delay |
3~8ms |
|
|
|
Communication Distance |
15km |
|
|
|
|
Communication Method |
Supports TDD duplex communication |
|
|
|
|
Maximum Transmitting Power |
30dBm |
|
|
|
|
Uplink Throughput Rate |
115kbps |
|
|
|
|
Downlink Throughput Rate |
2.3Mbps~13.3Mbps |
|
|
|
|
|
|
|
|
|
|
Rotor Plate |
Fixed-wing Plate |
Cluster Plate |
|
|
Command Drones Amount |
/ |
1 |
1 |
|
|
Quadcopter Drone Amount |
1 |
/ |
4 |
|
|
Ground Station |
CPU |
Intel Core i7 10th Processor |
||
|
GPU |
NVIDIA GeForce GTX 1650 |
|||
|
Memory |
16GB |
|||
|
Storage |
512GB |
|||
|
Screen Size |
15.6 inch |
|||
|
Screen Resolution |
1920×1080 |
|||
