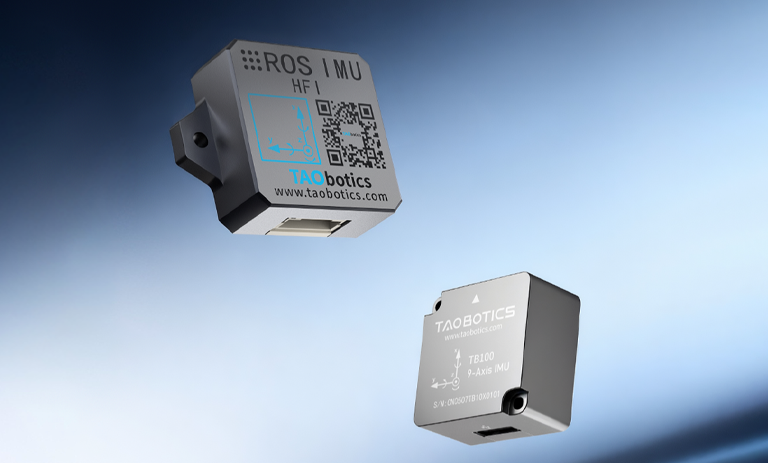
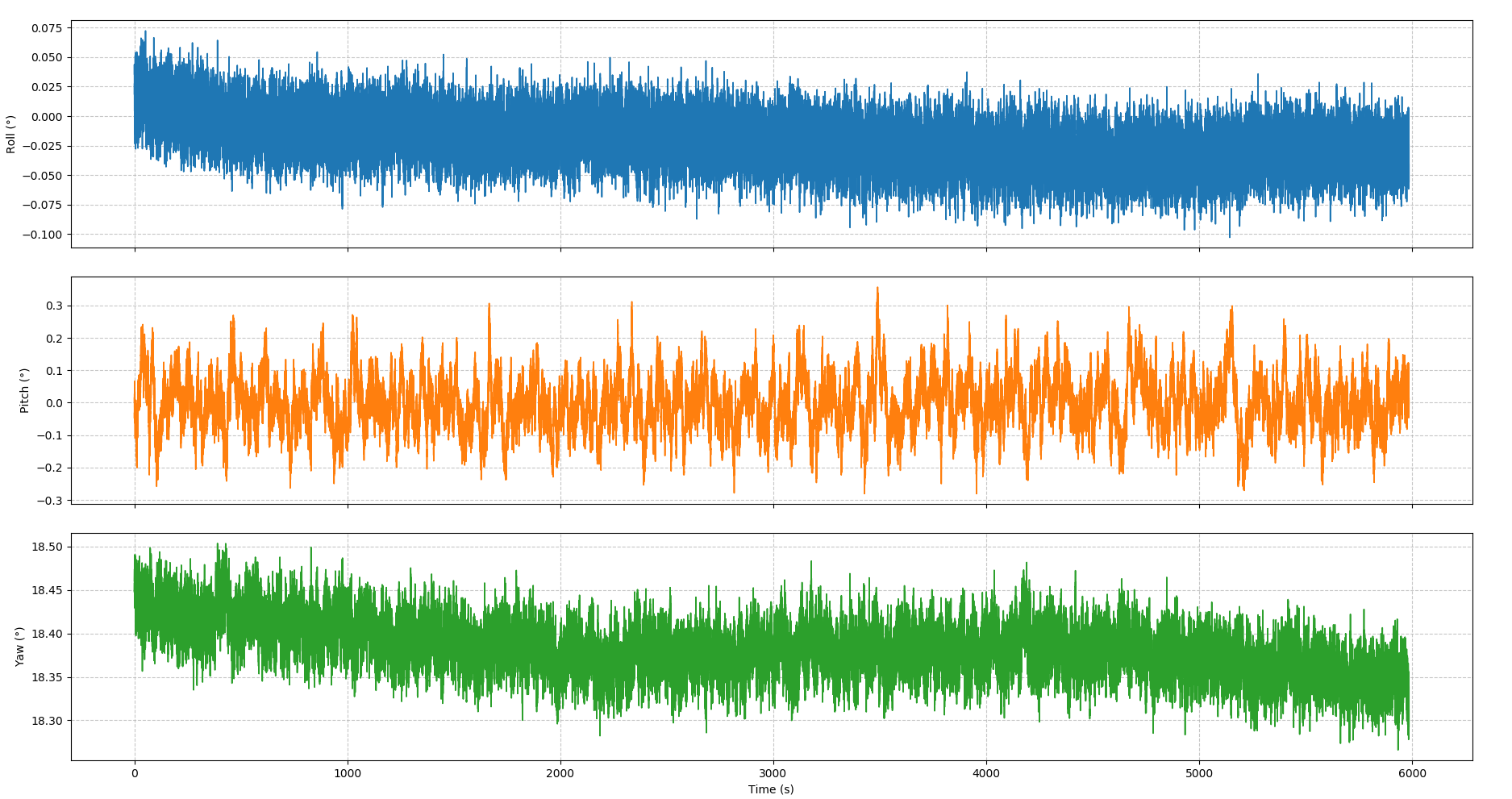
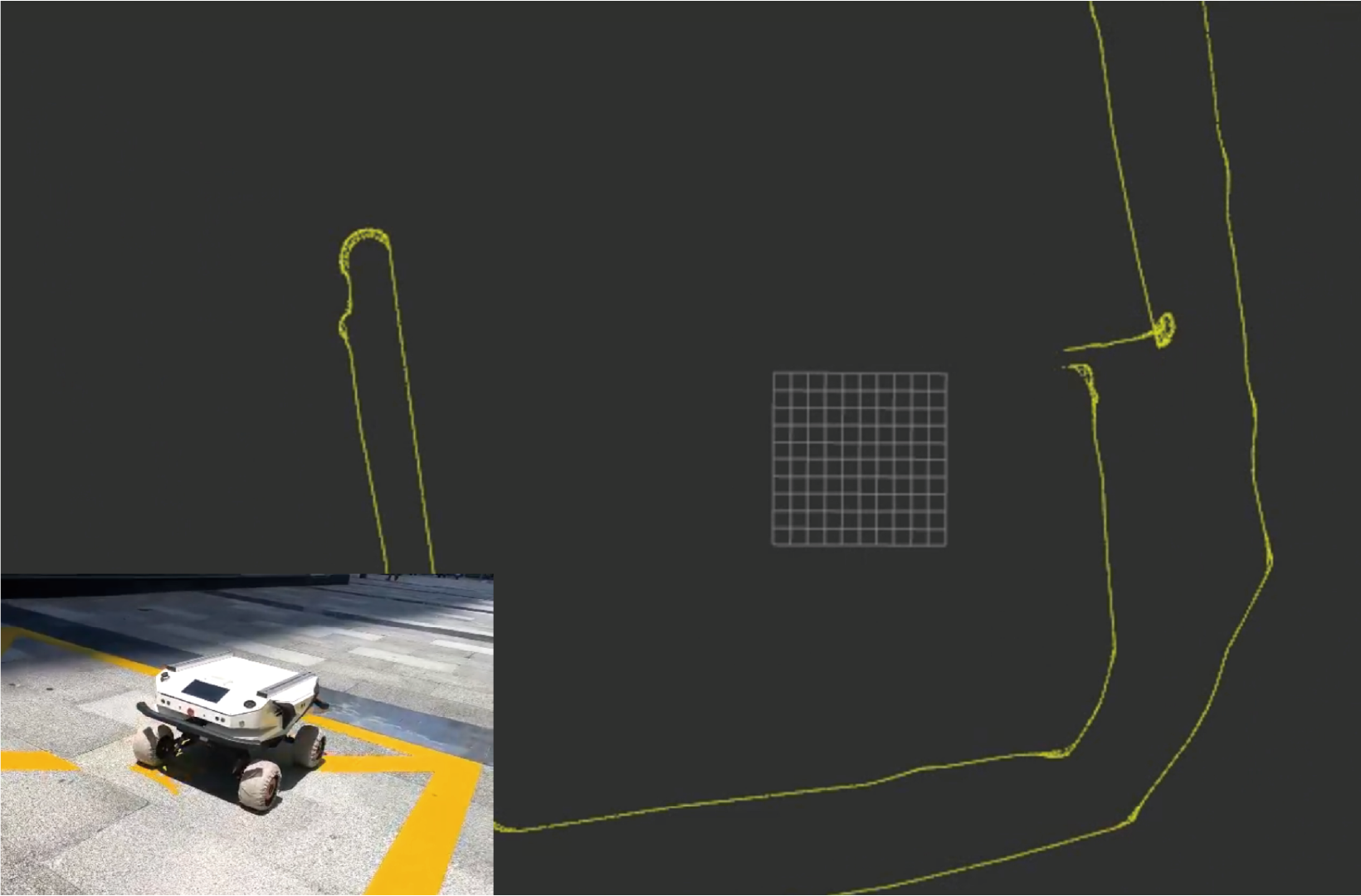
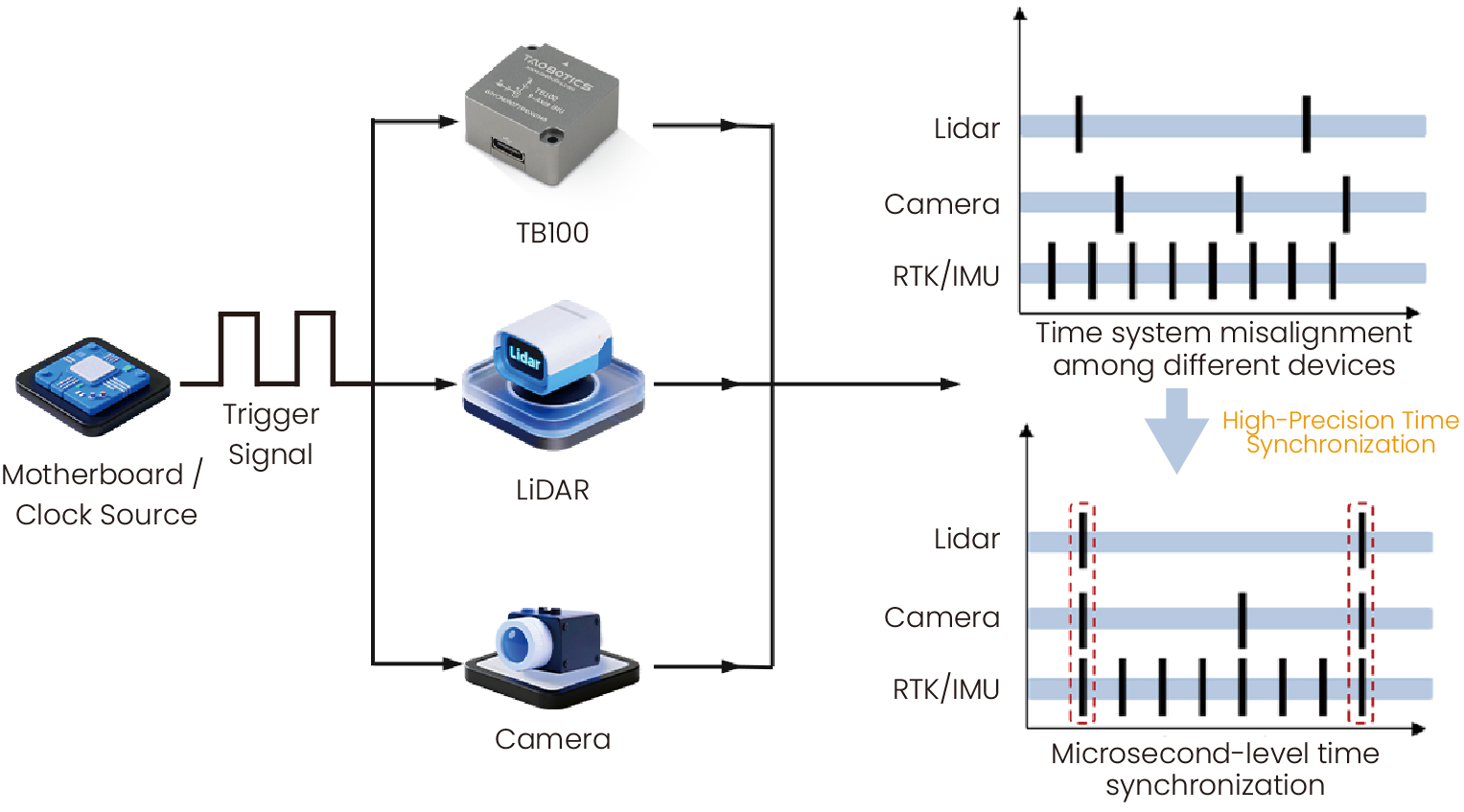
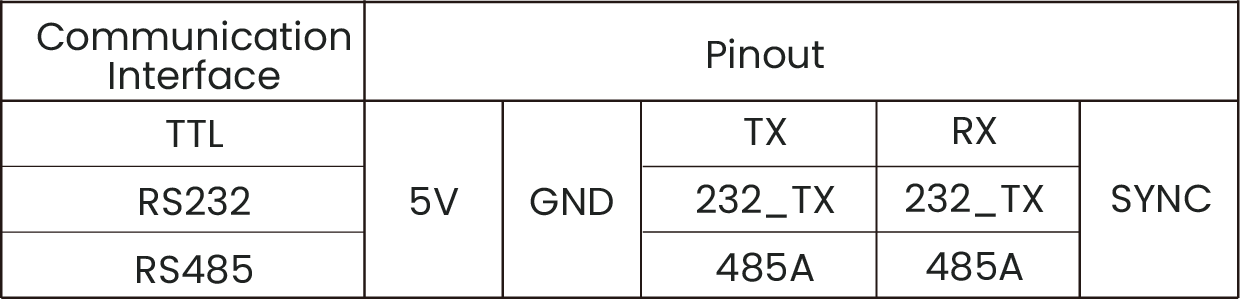
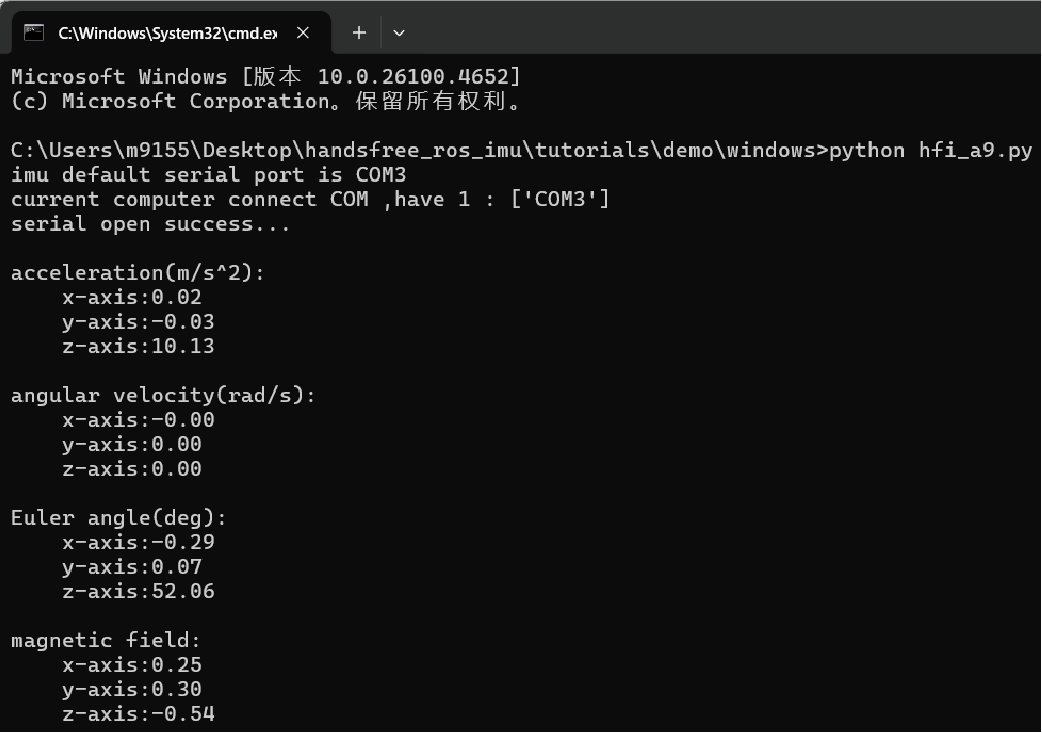
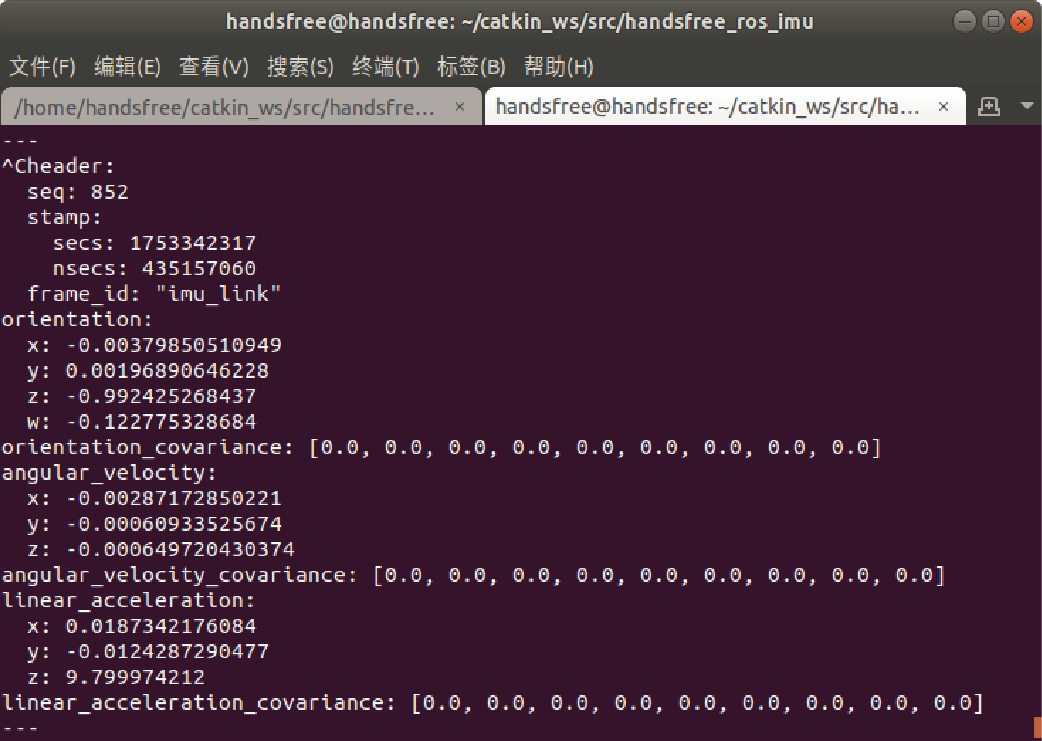
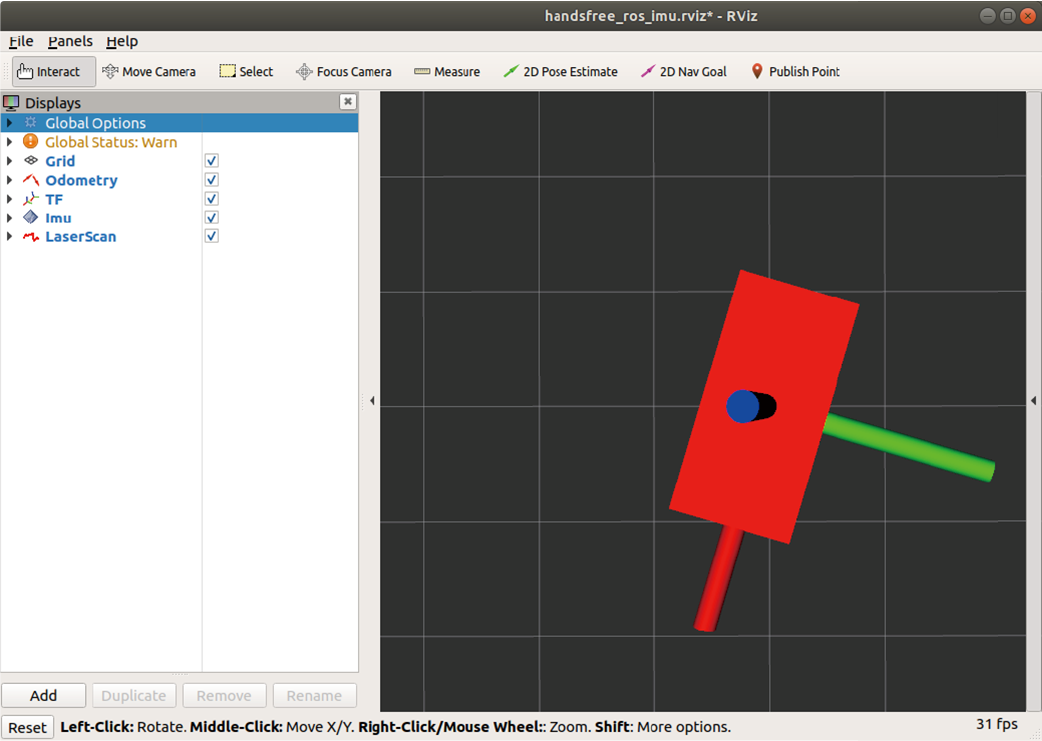
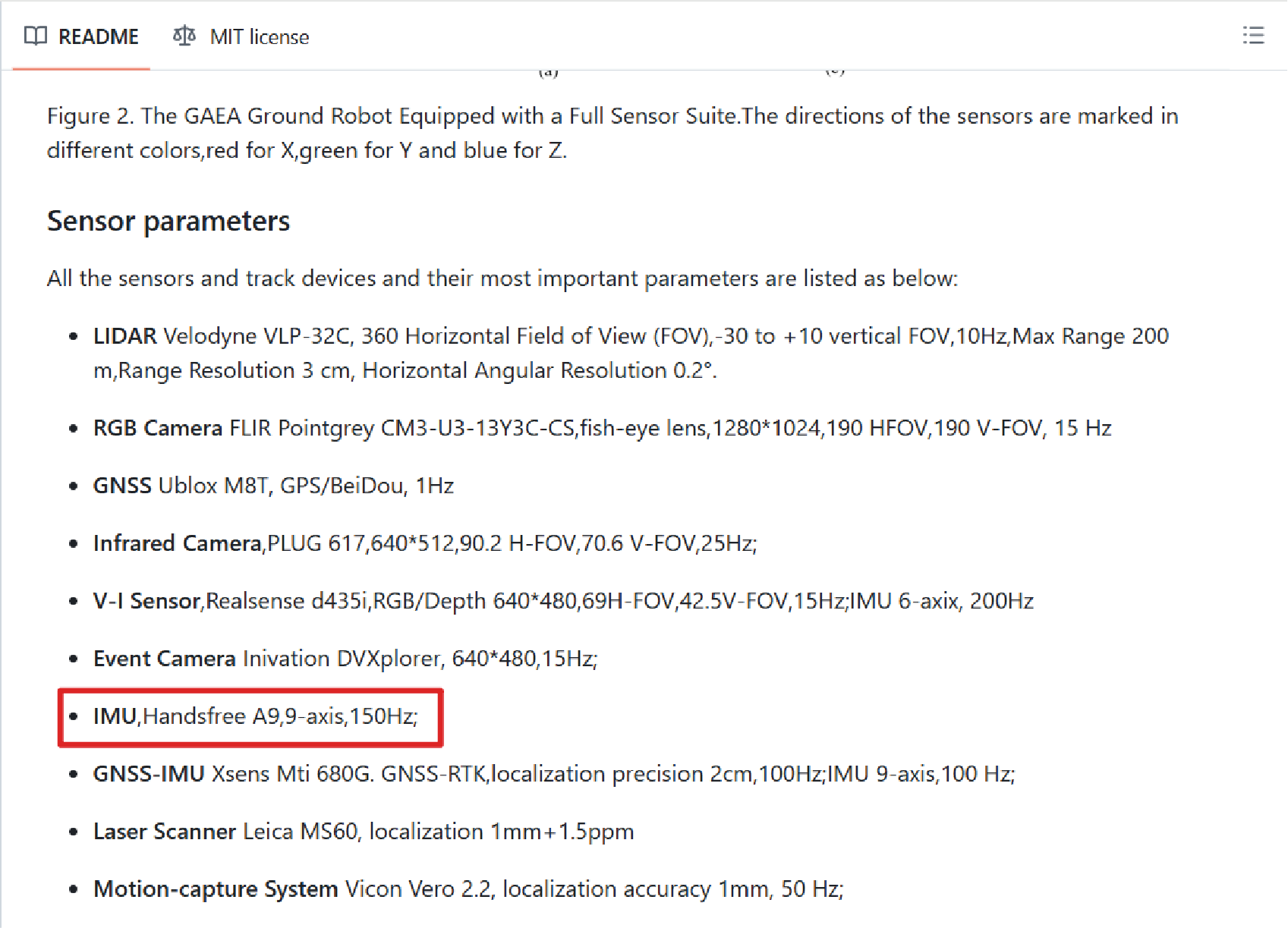
Taobotics TB-Series Industrial 9-Axis IMU features anti-magnetic interference, factory precision calibration, 0.1° RMS high accuracy, and 800 Hz high-frequency output. It supports output of acceleration, angular velocity, magnetometer data, and attitude angles, making it widely suitable for robotics, UAVs, unmanned vehicles, and more. The module offers hardware trigger functionality, enabling microsecond-level synchronization with LiDAR, cameras, RTK, and other devices. It supports multiple communication interfaces (USB-C, TTL, RS232, RS485) and is compatible with ROS, Python, and C++ for seamless integration with various acquisition systems. The upper-computer software allows real-time data display, recording, waveform analysis, and parameter configuration. Built to industrial-grade standards, it delivers exceptional cost-effectiveness.




















{kind=link}
{kind=link}

{kind=link}
{kind=link}










{kind=link}
{kind=link}
{kind=link}
{kind=link}
