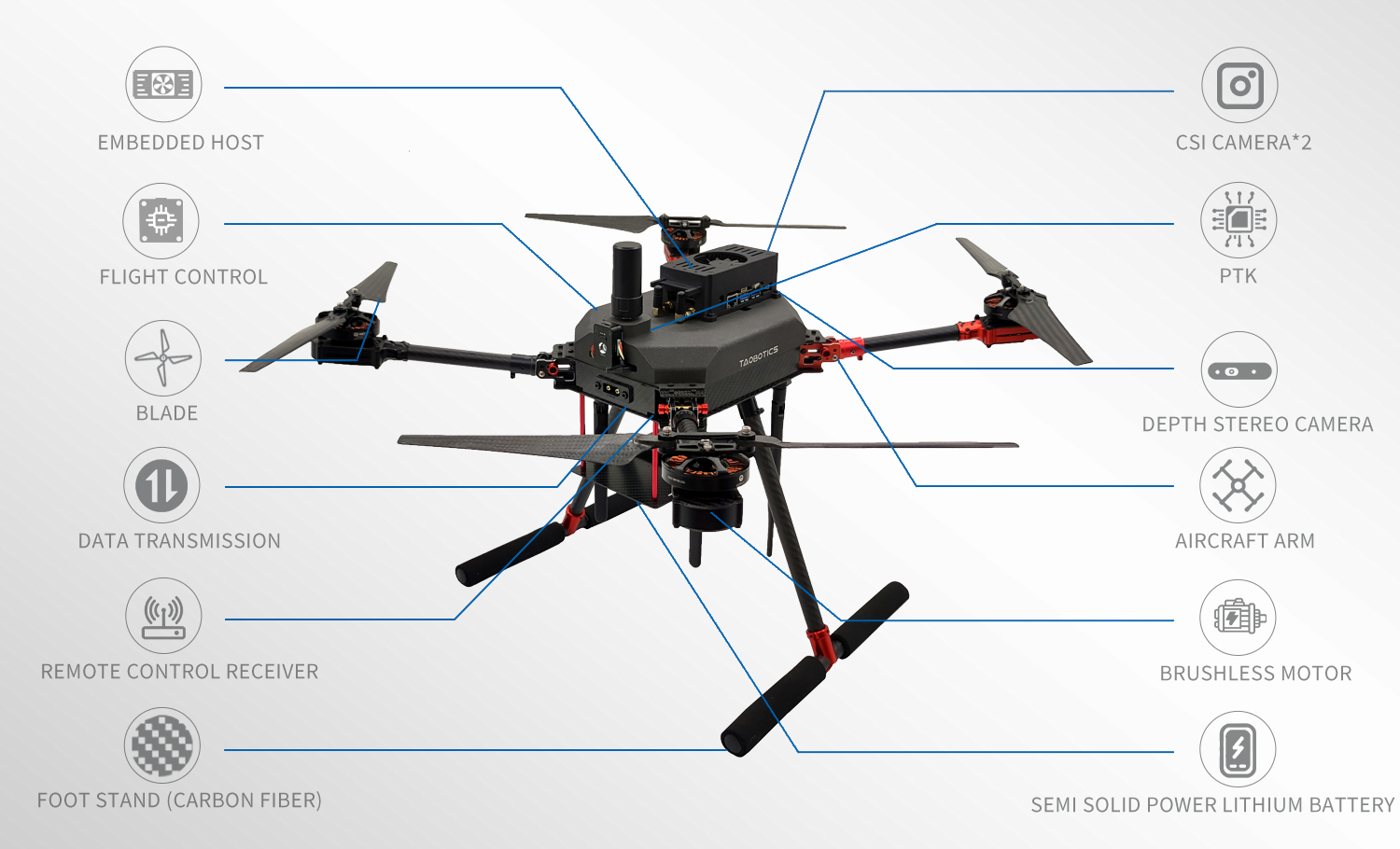
With a 600mm wheelbase and a carbon fiber platform design, the Q600 is robust and extensible. It is a multi-functional platform designed for UAV developers and researchers, suitable for the application research and secondary development of UAVs.
PRODUCT FEATURES
Modular Design
Cluster Formation
RTK Positioning
Ultra-long Battery Life
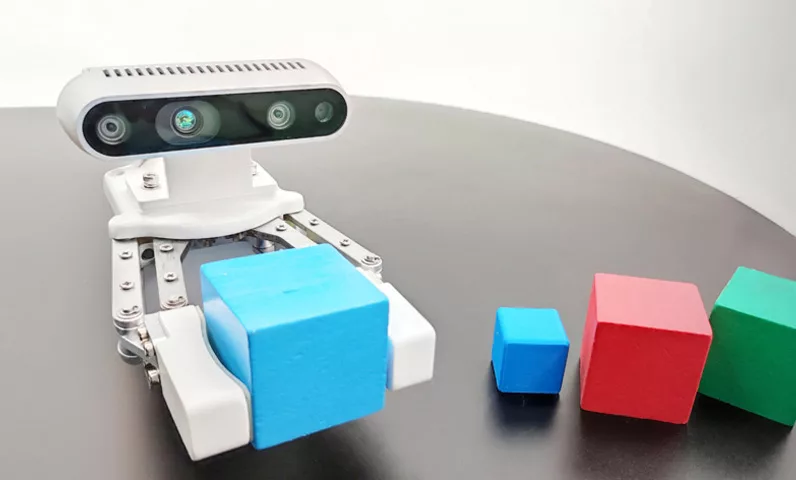
Camera
Supporting Secondary Development
Rich Interface
Open Source Code
C++
Python
ROS
Use Tutorial
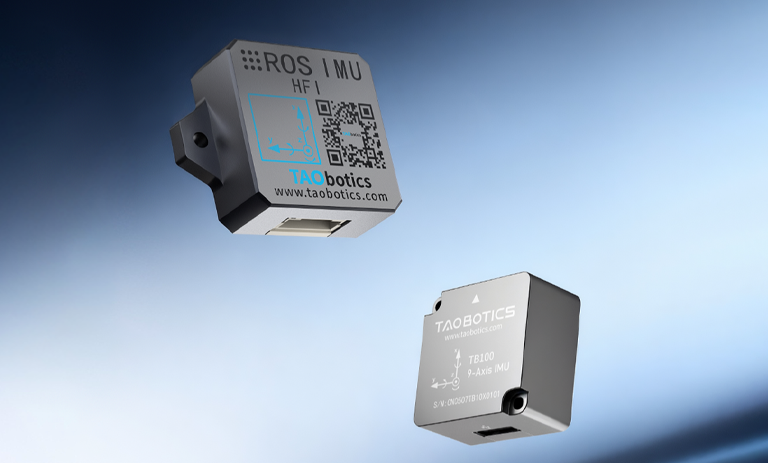
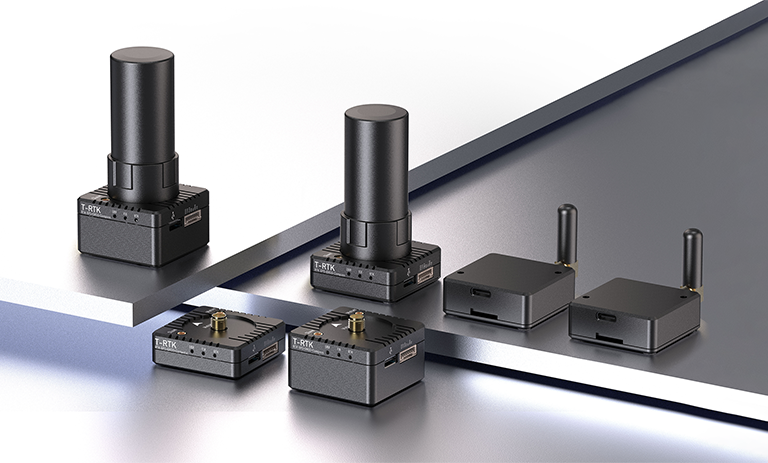
Accurate Positioning
Uav is equipped with high-precision gps-rtk module, the refresh rate is as high as 20 hz, positioning accuracy up to 0.01 m + 1 PPM, to ensure accurate positioning, significantly improve accuracy and reliability.
Ultra Long Endurance
Uav is equipped with large capacity of semi-solid lithium battery, support for 42 minutes of flight time, reduce the battery replacement of downtime, improve work efficiency.
Super Computing Power
The drones are powered by the Nvidia Jetson series embedded mainframe, providing powerful computing power and efficient data processing. Whether it’s image recognition or path planning, Jetson hosts respond quickly and optimize task execution in real time.
Secondary Development
Uav supports C++ and Python programming, the code is open source and accompanied by tutorials, providing powerful secondary development capabilities. Users can customize the functions according to their needs and easily expand the application for research and education.
Designer and manufacturer of mobile robots, shipped to over 50 countries worldwide
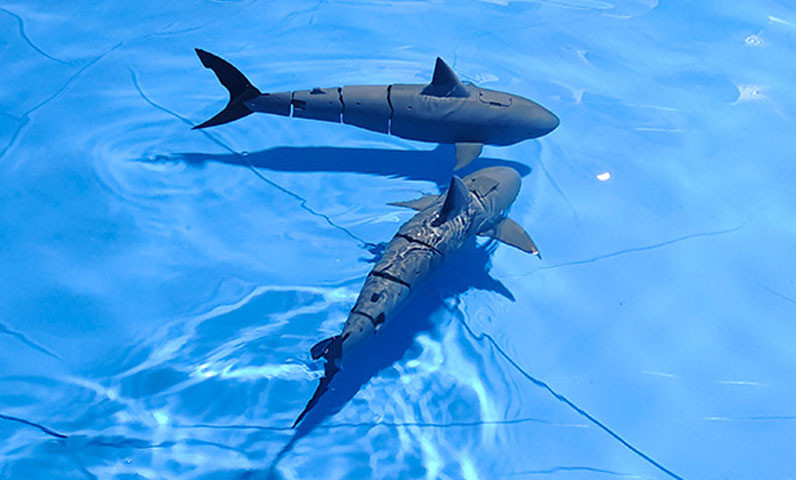
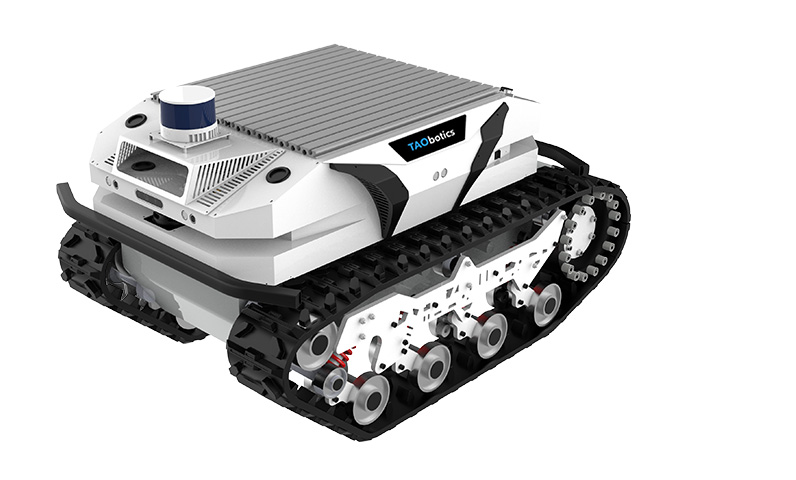
Multi-agent Cooperation
Systems support uav and the collaborative operation between different agents, such as car. Through collaboration, drones can conduct aerial reconnaissance and unmanned vehicles can perform ground transportation, increasing mission complexity and overall efficiency. This kind of cooperation enhances the function complementarity of each agent and optimizes the operation effect.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}