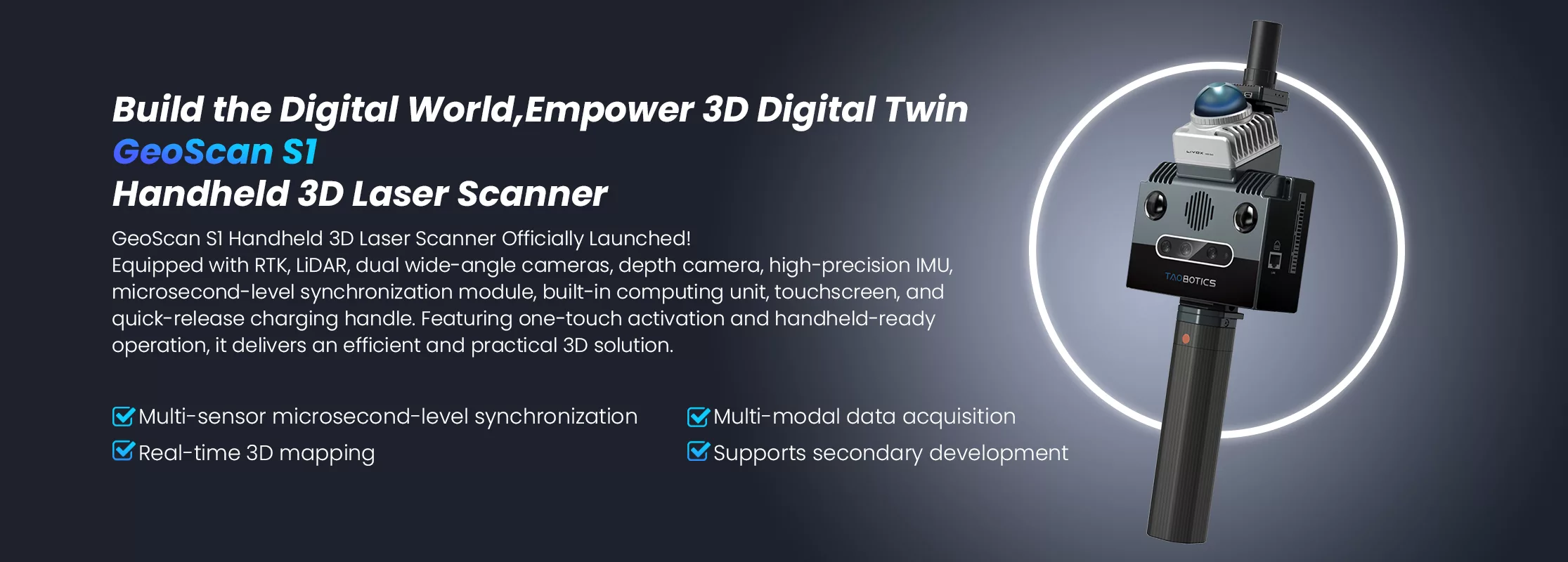
GeoScan S1: The Ultimate Cost-Effective Handheld 3D Laser Scanner is Now Available!
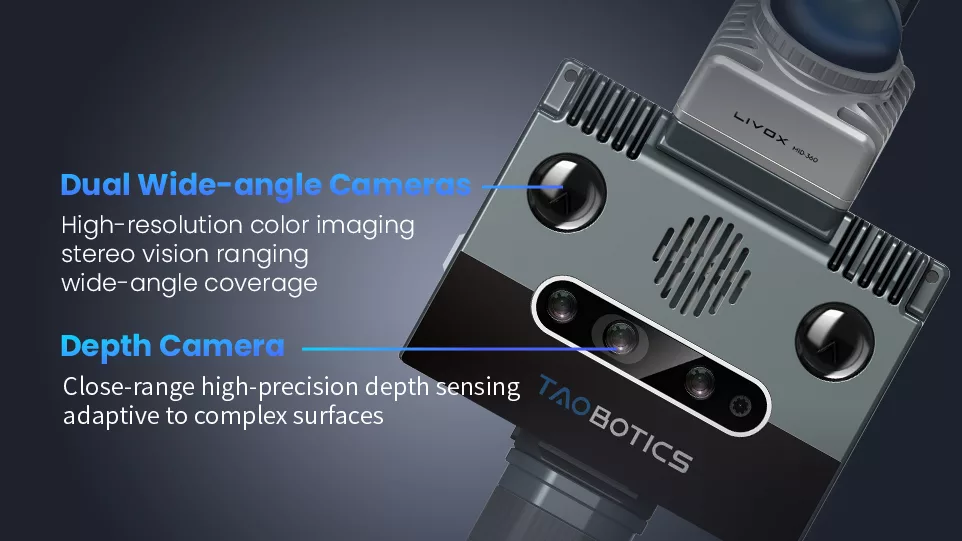
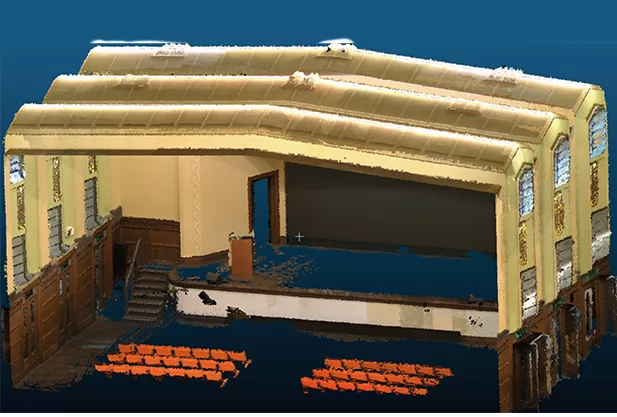
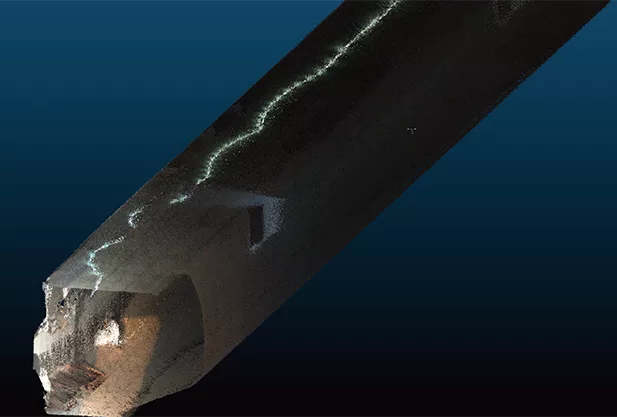
Featuring a lightweight design and one-touch operation, this device provides an efficient and practical 3D solution. Driven by multi-modal sensor fusion algorithms, it enables real-time reconstruction of 3D scenes with centimeter-level accuracy, adaptable to a wide range of industrial and environmental applications.
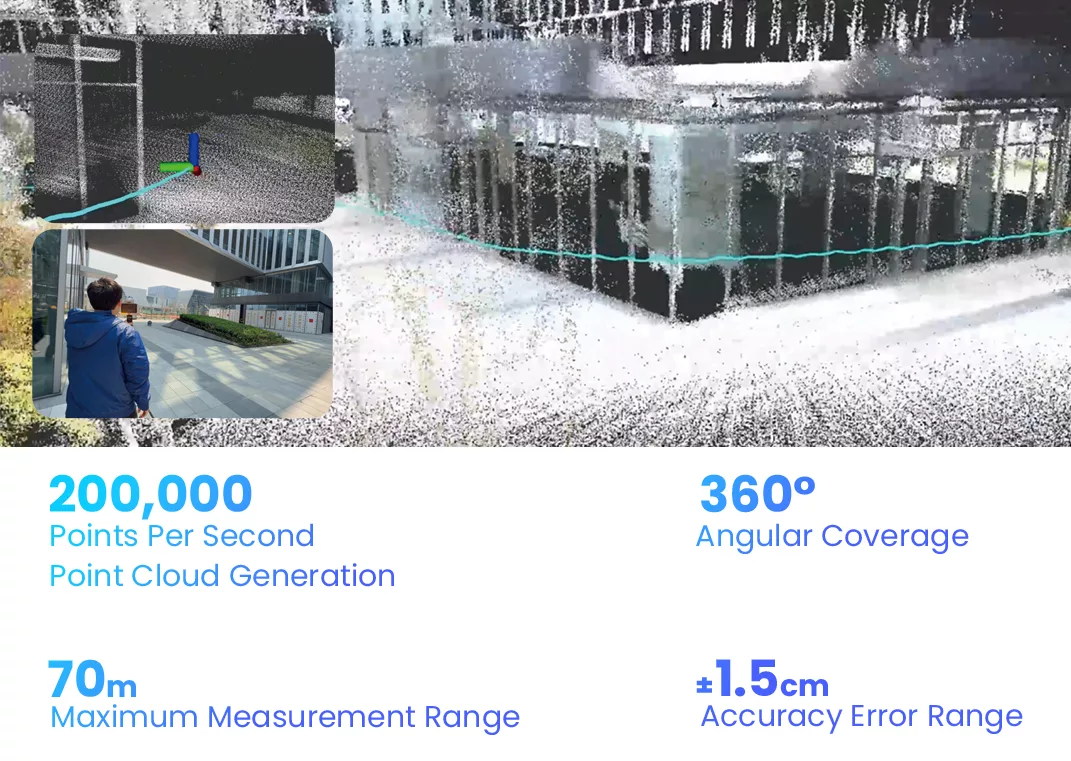
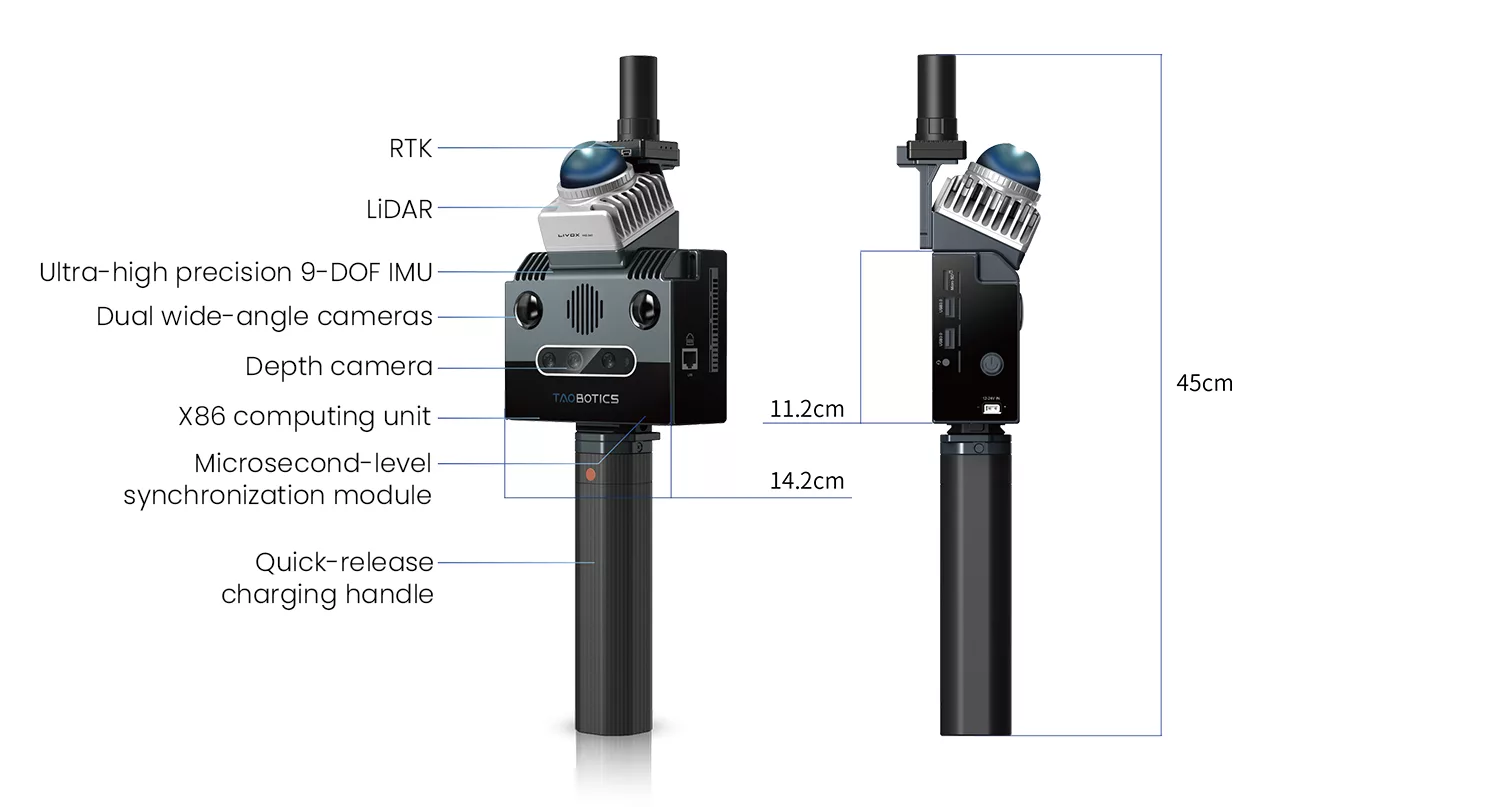
With 200,000 points per second mapping capability, a 70-meter measurement range, and 360° full coverage, it effortlessly handles large-scale scenes exceeding 200,000㎡. The optional 3D Gaussian data capture module ensures high-fidelity real-world replication, while cross-platform integration—supported by a high-bandwidth Ethernet port and dual USB 3.0 interfaces—offers flexible expansion for research and experimentation.
Designed to lower development barriers, it empowers developers to rapidly acquire R&D capabilities and unlock limitless innovation possibilities!